Servo's
 Bij het bouwen van een modelbaan moeten vele keuzes worden gemaakt, zo ook voor de aandrijving van wissels.
Bij het bouwen van een modelbaan moeten vele keuzes worden gemaakt, zo ook voor de aandrijving van wissels.
Voor het omzetten van wissels zijn er verschillende mogelijkheden.
Zo is er de mogelijkheid van de conventionele wissel aandrijvingen, door middel van magneetspoelen.
Dit zijn de standaard elektrische aandrijving die geleverd worden door de bekende merken zoals Märklin, Roco, Fleischmann, Piko etc.
Dan zijn er nog de verschillende type motor aandrijvingen van bijvoorbeeld Bemo, Fugelrex, Turtoise, Piko, Conrad etc.
En dan hebben we natuurlijk nog de servo aandrijving, een aandrijving die steeds meer populariteit wint onder de modelbouwers.
Ook dit is een aandrijving die door mij wordt toegepast bij alle wissels die in het zicht liggen.
Een van de wensen was dat de wissels die in het zicht liggen een zo'n natuurgetrouwe loop moeten hebben.
Dit betekend dat een magneet aandrijving niet toegepast kan worden omdat de tongen dan zeer snel van stand veranderen.
Deze beweging komt dus totaal niet met overeen met de werkelijkheid.
In werkelijkheid gaat een wisseltong geleidelijk om.
De aandrijving moest dus een motor of servo aandrijving worden omdat beide systemen de wisseltong geleidelijk kunnen omzetten.
Gezien de motor aandrijvingen in veel gevallen luidruchtig zijn, en de "stille" motor aandrijvingen over het algemeen vrij duur zijn, is er gekozen voor de servo aandrijving.
Daarnaast bleek dat de decoders voor een servo aandrijving in veel gevallen goedkoper zijn dan voor motor aandrijvingen.
Met het gebruik van servo's ligt de prijs per wissel zo rond de € 10,00 a € 14,00, dit is de servo inclusief de decoder.
Indien er magneetspoelen worden gebruik liggen deze kosten rond de € 28,00. per wissel.
Dit is dus 2 tot bijna 3x zo duur. Niet erg als het gaat om een paar aandrijvingen, maar als je ruim 40 aandrijving voor de wissels moet plaatsen ligt de zaak even wat anders.
Dus eigenlijk twee vliegen in een klap, een mooie natuurgetrouwe aandrijving en een stuk goedkoper dan de conventionele aandrijvingen.
Meer informatie over de gebruikte servo decoder kun je vinden in het hoofdstuk "Techniek - decoders".
Maar er kan meer met servo's dan alleen een wissel aandrijven.
Je kun er ook armseinen mee aansturen of deuren er mee openen en sluiten.
En als je echt van knutselen houd en niet terug deinst voor wat doorzettingsvermogen kun je zelfs beweging aan poppetjes, schommels, kranen en/of voertuigen toevoegen.
Ik heb de volgende indeling gemaakt, zodat je snel naar het onderwerp kunt gaan:
Keuze menu:
Opbouw servo aandrijving.
Aanpassing voor wissel in museum lijn.
Deuren van de loc loods.
Opbouw servo aandrijving.
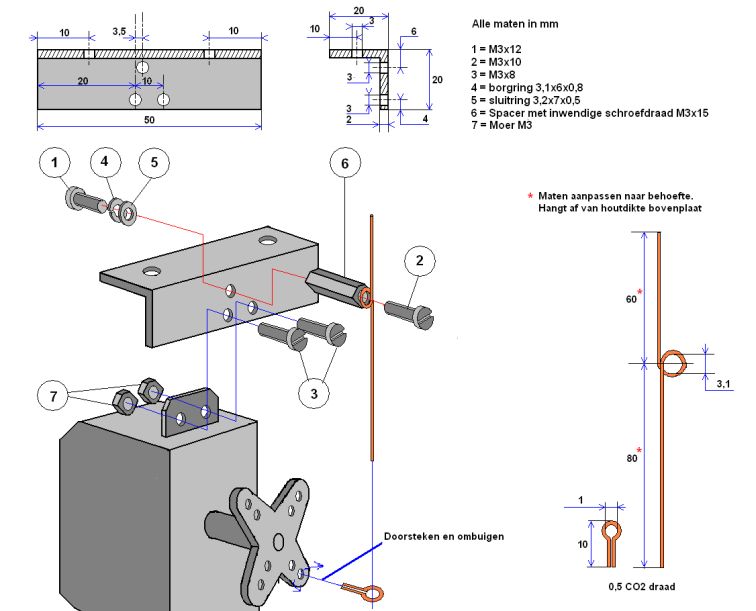 De aandrijving van de servo is vrij simpel van opbouw. De tekening hiernaast toont de constructie zoals deze is gebruikt bij het plaatsen van de servo's.
De aandrijving van de servo is vrij simpel van opbouw. De tekening hiernaast toont de constructie zoals deze is gebruikt bij het plaatsen van de servo's.
De complete beschrijving en deze tekening komt overigens van de website van Etecmo. (met toestemming geplaatst)
Beschrijving:
De mechanische constructie voor een servo kan simpel en eenvoudig zelf worden gemaakt.
Voor de beugel gebruiken we een stukje aluminium hoek profiel van 20x20 mm, en is een standaard maat die in de bouwmarkt of doe-het-zelf handel goed te verkrijgen is.
Hiervan wordt een lengte af gezaagd van 50mm.
De volgende stap is het boren van de montage gaten voor in de bovenplaat.
De maten voor deze gaten wordt aangegeven op de tekening en mogen naar behoeft worden aangepast.
De gebruikt servo motor (type RS-2 van Modelcraft) had aan de voorzijde van de montage plaat een kleine nok zitten die met en scherp mes eenvoudig kan worden weggesneden.
Dit is nodig omdat de servo met de bevestigingsplaat vlak op de aluminium hoeklijn moet worden gemonteerd.
Vervolgens kunnen de overige 3 gaten worden geboord zoals die worden aangegeven op de tekening.
Indien dit is gebeurd kan de servo worden gemonteerd op de aluminium hoeklijn en kan de spacer (no 6 op de tekening) worden geplaatst.
De spacer is niets anders dan een 6 kantige afstand houder met inwendig doorlopende M3 schroefdraad. Deze zijn makkelijk te verkrijgen bij de (internet) elektronicawinkel en wordt meestal gebruikt als afstand montage bus voor printplaten. Een ronde uitvoering is natuurlijk net zo bruikbaar als deze in het voorbeeld.
De aandrijfstang, die later in de wissel geplaatst wordt, is gemaakt van Co2 lasdraad.
Het voordeel van deze draad is dat hij veerkrachtig en stevig is.
Dit draad is eveneens makkelijk verkrijgbaar en is in diverse diameters leverbaar en wordt op een rol geleverd.
Er is gekozen voor 0,5 mm Co2 draad omdat deze goed past in het gaatje van de beweegbare wisselstang, makkelijk te buigen is, maar is ook stevig en veerkrachtig.
Als het draad van de rol wordt gehaald, zul je merken dat deze spiraalvormig is. Door deze aan één zijde in de bankschroef te klemmen en de andere zijde in de kop van een boormachine te bevestigen, kan de draad recht gemaakt worden door deze strak te trekken en de boorkop even te laten draaien.
50 tot 100 slagen is over het algemeen voldoende.
De draad is nu mooi recht geworden en kan vervolgens worden gebogen volgens tekening.
Om het oog in de draad op een juiste diameter te buigen, kan er gebruik gemaakt worden van een spiraalboor van 3,1mm.
Door deze in een bankschroef te klemmen kan het oog gebogen worden door deze om het boortje heen te buigen.
Belangrijk is dat er niet al te veel spelling ontstaat tussen dit oog en het M3 boutje waarmee later de draad moet worden vastgezet.
Ook het oog dat later in de hevel geplaatst moet worden kan op dezelfde manier van deze draad gebogen worden.
Hierbij maken we echter gebruik van een spiraalboortje van ca 1mm.
Vervolgens plaatsen we dit oog in de hevel die op de servo moet worden bevestigd en kunnen de uiteinde worden omgebogen.
De aandrijfstang kan nu worden geplaatst en met een M3 boutje (no 2 in de tekening) worden vastgezet zoals is aangegeven in de tekening.
Voordat de hevel definitief op de servo kan worden geplaatst, moet eerst de zaak mechanisch afgesteld worden.
De meeste servo's kun je met de hand verdraaien, indien de hevel (of schijf) is geplaatst.
Men dient er nu voor te zorgen dat de servo mechanisch in de middenstand staat, voordat de hevel definitief op de servo wordt geplaatst.
Dit kan door eerst de hevel los op de servo te plaatsen en deze voorzichtig te draaien, totdat de servo in het midden staat.
Indien de hevel nu op de servo wordt geplaatst, moet de aandrijfstang en recht omhoog steken en in het verlengd van de hevel staan.
Mogelijk dat door de vertanding die op de as van de servo zit dit niet voor 100% haalbaar is. Kies dan de meest gunstige stand.
Als dit het geval is kan de hevel definitief worden vast gezet.
De aandrijving is nu in principe klaar om onder een wissel geplaatst te worden.
Het enige wat na het plaatsen nog dient te gebeuren is het elektronisch afstellen van de snelheid en uitslag van de servo.
Indien dan ook de zaak elektronisch is afgesteld rest alleen nog dat de overtollige draadlengte die door de beweegbare wisselstang steekt af te knippen.
Keer terug naar menu.

Aanpassing voor wissel in museum lijn.
De servo voor het aansturen van de wissel bij het eindstation in de museum lijn, kon niet volgens bovenstaande methode worden geplaatst.
De servo is hier anders gemonteerd waardoor er een ander soort aandrijving is ontstaan zoals hierboven is beschreven.
Hierbij moest de servo naast de baan worden geplaatst, omdat onder de desbetreffende wissel een spoor loopt en de doorrij hoogte beperkt is.
Omdat de slag die de servo hier moet maken, kleiner is dan bij de "standaard" servo aansturing (30 graden i.p.v. 90 graden), is ook de instelling van de decoder gewijzigd.
Vanwege de klein slag is ook de snelheid hierbij aangepast om de tongen toch langzaam te laten bewegen.
Bij deze wissel is de servo aan de zijkant geplaatsten en zal bij de scenery bouw volledig in de berg weg vallen zodat deze niet meer zichtbaar is.
Doordat de servo anders wordt geplaatst, zal de aandrijfstang op een afwijkende manier moeten worden gemonteerd.
 In plaats van een "pen verbinding" naar boven, moet nu een zijwaartse beweging worden gemaakt.
In plaats van een "pen verbinding" naar boven, moet nu een zijwaartse beweging worden gemaakt.
Het probleem echter bij een zijwaartse aandrijving is dat de aandrijfstang makkelijk uit het gat van het beweegbare deel van de wissel kan vallen.
Om dit te voorkomen, is er een klein printplaatje tegen de onderzijde van het houten profiel bevestigd, waarop in de lengte richting een kleine messing buisje op is gesoldeerd.
De aandrijfstang voor de wisseltongen loopt nu door dit kleine buisje. Hiermee wordt voorkomen dat de aandrijfstang uit de wissel kan vallen.
Keer terug naar menu.
Deuren van de loc loods.
Een andere toepassing met de servo is het openen en sluiten van deuren.
Dit is onder andere toegepast bij de deuren in de loc loods.
De manier waarop een servo dan moet worden ingebouwd en hoe de overbrenging naar de deuren moet worden uitgevoerd, hangt natuurlijk sterk af van de loc loods die gebruikt wordt.
De gebruikte loc loods in hier een Fleischmann model, maar kan natuurlijk bij elk type worden toegepast.
Voor de inbouw moet er wel het een en het ander gewijzigd worden aan deze loods.
Hoe het een en het ander is aangepast en de servo's zijn ingebouwd kun je lezen in de rubriek "Loc depot".


Keer terug naar menu.
Keuze rail materiaal
 Na de grove schetsen van het banenplan moest er een keuze gemaakt worden voor het rail materiaal. Een van de belangrijkste afweging was het beschikbare ......
Na de grove schetsen van het banenplan moest er een keuze gemaakt worden voor het rail materiaal. Een van de belangrijkste afweging was het beschikbare ......
Digitale techniek
 Hoewel de baan evengoed analoog aangestuurd had kunnen worden is er bewust een keuze gemaakt om dit digitaal te gaan doen. De mogenlijkheden die ......
Hoewel de baan evengoed analoog aangestuurd had kunnen worden is er bewust een keuze gemaakt om dit digitaal te gaan doen. De mogenlijkheden die ......
Besturing
 Er zijn verschillende software pakketen die een geautomatiseerde treinloop mogelijk maken. Sommige zijn zeer beperkt, de andere heeft zeer uitgebreide mogelijkeheden .....
Er zijn verschillende software pakketen die een geautomatiseerde treinloop mogelijk maken. Sommige zijn zeer beperkt, de andere heeft zeer uitgebreide mogelijkeheden .....
