Faller Car
 Tijdens de bouw van de baan is besloten om de modelbaan ook te voorzien van een Faller Car systeem.
Tijdens de bouw van de baan is besloten om de modelbaan ook te voorzien van een Faller Car systeem.
Het systeem is gebaseerd op een stalen geleidedraad in het wegdek die door een magneet gevolgd kan worden.
Mogelijk dat in de (vere)toekomst ook digitaal bestuurd gaat worden, maar voorlopig zal dit nog niet gebeuren.
Het kan zijn dat straks allerlei wegen weer opgebroken moeten worden t.b.v. de digitalisering, maar dat nemen we dan maar voor lief.
Hebben tenslotte voor hetere vuren gestaan.
Gezien de grote van dit hoofdstuk is er een keuze menu gemaakt wat het zoeken wat makkelijk maakt.
Keuze menu:
De rijdraad en de lus voor de Faller Car baan.
Het aanbrengen van de magneetband.
Uitvoering van het eerste deel van de Faller baan.
Wissel voor de Faller baan.
Plaatsing servo.
Plaatsing stop magneet.
Zo te zien werkt het ..........(filmpje)
De afbouw van de Faller Car keerlus.
De zelfbouw Faller Car wissel verbeterd.
Doortrekken van de Faller Car baan.
De Faller Car baan verlaat het station.
De aansluiting naar de stad.
Opnieuw een nieuwe wissel.
Automatische aansturing van de nieuwe wissel.(bevat sub menu's)
De rijdraad en de lus voor de Faller Car baan.
Zoals je onder het hoofdstuk "Scenery, talud bouw" hebt kunnen lezen, hebben we het talud langs het industrie terrein gebouwd, is de berg in de hoek afgemaakt en kunnen nu verder met het talud achter de toekomstige plaats van de loc loodsen.
Tevens is dit ook het gedeelte waar de sporen van en naar het station liggen en waar ook de lus van de Faller Car baan komt te liggen.
Voordat we dit talud met de tunnelportalen voor de sporen kunnen maken, moet eerst een stuk Faller baan gebouwd worden om verder te kunnen.
Deze ligt namelijk op een plek waar we later niet meer zo goed bij kunnen.
De lus voor de Faller auto’s wordt namelijk verborgen onder een hoek van de parade baan en moet dus zeer betrouwbaar functioneren.
Na veel vijven en zessen hebben we een geslaagde methode gevonden om de Faller autobaan te kunnen realiseren, waarbij het ook nog eens betrouwbaar functioneert.
Van origine maakt het Faller Car systeem gebruik van een stalen draad in het wegdek.
Aangezien er geen gebruik wordt gemaakt van standaard Faller baanstukken is er gezocht naar een zelfbouw methode.
De eerste methode die gebruikt was bestond uit het uitfrezen van een sleuf in een plaat triplex om daarin de stalen rijdraad te plaatsen en vervolgens het wegdek aan te smeren met een dunne laag gips.
Deze methode lijkt leuk en effectief, maar werkt niet altijd even betrouwbaar.
Tijdens proeven die hiermee genomen zijn, bleken verschillende voertuigen hier toch dusdanige problemen mee te hebben, dat er geen garantie was dat de voertuigen ook de draad bleven volgen.
Een kleine oneffenheid, een iets te hoog geplaatste staaldraad of een iets te dikke laag gips was voldoende om het voertuig een verkeerde kant op te sturen .
Dit had natuurlijk het gevolg dat de voertuigen letterlijk en figuurlijk de weg kwijt waren.
Daarnaast bleek dat het gips bij een dunnen laag snel af brokkelt en is moeilijk glad en egaal te krijgen.
Gezien de plek waar dit geplaatst moet worden, is het later, na de afwerking van de scenery, moeilijk bereikbaar en is er naar een betere, en vooral betrouwbare, oplossing gezocht.


De oplossing is gevonden door het plaatsen van een magneetband strip in het wegdek, maar hierover later meer.
Het enige grote verschil is dat de sleuf wat breder en dieper moet zijn dan bij het gebruik van de staaldraad.
De sleuf is zo diep gemaakt, dat de bovenkant van de magneetstrip gelijk zit met het bovenkant van het triplex.
Als wegdek is er voor gekozen om karton (300 grams) te gebruiken, wat nog een bijkomend voordeel heeft, dat het wegdek al een redelijk echte asfalt kleur heeft.
Bij proeven is het karton tijdelijk even vast gezet met hier en daar een punaise.
De proeven toonde al aan dat dit systeem veel beter werkte.
In de eerste poging om het karton definitief vast te zetten is het karton vastgelijmd, maar dit bleek nogal wat nadelen te hebben.
Door het gebruik van lijm ging het karton vaak bol staan of werd ribbelig (het blijft tenslotte papier).
Eerst nog hoop gehad dat dit wel weg zou trekken (zoals bij behang), maar niets bleek minder waar.
Uiteindelijk besloten om het karton vast te zetten met dunne dubbelzijdige tape.
Dit blijkt eenvoudig en makkelijk te werken en heeft tot op heden totaal geen problemen gegeven.
Het aanbrengen van de magneetband.
Voor het uitfrezen van de sleuf, kun je gebruik maken van een boven frees met de juiste diameter.
Je moet dan wel de beschikking hebben over een boven frees machine en kan soms moeilijk zijn op slecht bereikbare plaatsen.
Ook zijn er bovenfreesjes voor op de Dremel verkrijgbaar die speciaal voor dit doel zijn gemaakt.
We hebben echter een goedkopere methode gevonden die, na wat oefening, net zo goed werkt.
Door een aantal sluipschijfjes op elkaar te monteren kun je ook een sleuf uitfrezen.
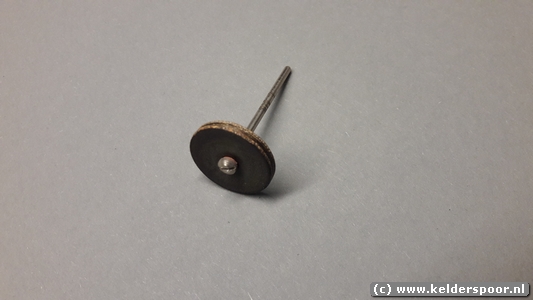
Het aantal schijfjes bepalen de uiteindelijk breedte van de sleuf en dit aantal hangt natuurlijk af van de dikte van één schijf.
Hoe dunner de schijf, hoe meer schijfjes je nodig hebt om de uiteindelijke breedte te halen. In mijn geval waren er 3 nodig.
Met enige oefening kun je de sleuf de juiste diepte geven.
Er kunnen wat oneffenheid ontstaan, maar in de praktijk is gebleken dat dit geen negatieve invloed heeft op het uiteindelijke resultaat, mits de magneetstrip maar onder het oppervlak van de triplex plaat blijft.
Bij het maken van bochten blijkt deze methode ook prima te werken.
Het feit dat de sleuf dan een beetje breder wordt heeft totaal geen negatief effect op de (ver)werking.
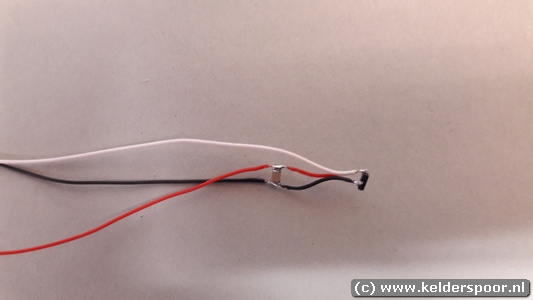
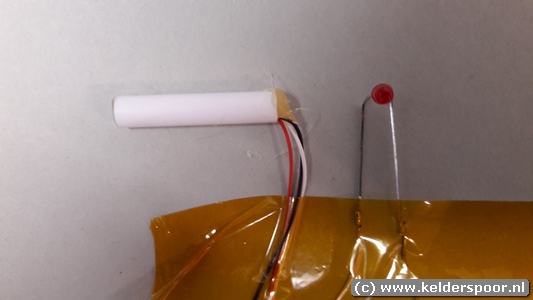
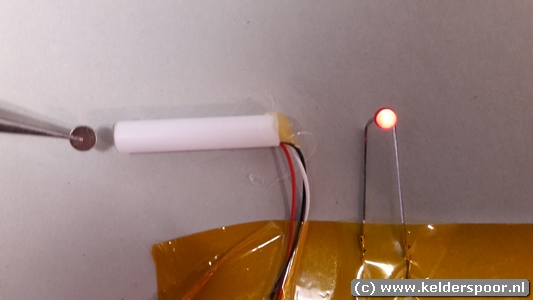
Voordat de magneetstrip geplaatst wordt is het belangrijk om te controleren welke zijde naar boven gericht moet zijn (noord en zuid pool).
Door de magneetarm van de stuurinrichting van de Faller auto boven de strip te houden, kun je zien of je de juiste zijde hebt.
Wordt de arm aangetrokken naar het midden van de strip, dan heb je de juiste kant naar boven.
Indien de arm weggeduwd of naar de zijkant van de strip wordt getrokken, moet je de strip omdraaien.
Overigens bleek bij mij dat er een tweetal van deze magneet armen op deze testmethode hierop verkeerd reageerde.
De magneet was blijkbaar verkeerd om geplaatst.
Vermoedelijk zijn deze magneten in het verleden door mijzelf een keer opnieuw vast gelijmd en bij een staaldraad is de richting van de magneet niet belangrijk.
Echter met een magneetstrip hebben we te maken met twee magneten die elkaar moeten aantrekken en is de plaatsingsrichting wel belangrijk.
De magneet strippen zijn op rol te koop en zijn o.a. te koop bij Conrad en CarParts.
Doorgaans is één zijde voorzien van een plakstrip, hetgeen niet alleen het aanbrengen een stuk eenvoudiger maakt, maar tevens ook de juiste kant van de magneetstrip aangeeft.
De plakstripzijde moet dan naar onderen geplaatst worden.
De controle is in mijn geval in ieder geval niet overbodig gebleken.
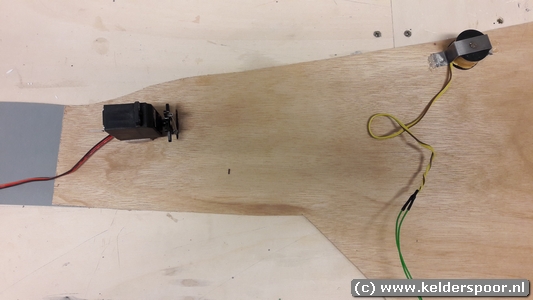
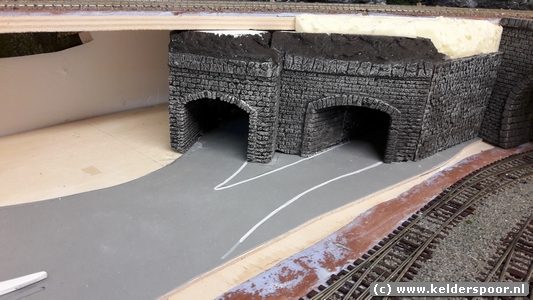
Uitvoering van het eerste deel van de Faller baan.
Het eerste deel van de Faller baan is dus het verdekte gedeelte, dat zich aan het uiteinde van het grote station bevindt.
De voertuigen verwijnen hier in een tunnel en komen na gekeerd te hebben aan de andere zijde van de weg weer uit.
Het is dus een soort keerlus voor het autoverkeer.
Zoals al eerder is beschreven moet dit betrouwbaar functioneren voordat de boel definitief wordt dicht gebouwd.
Hier onder een foto hoe dit is gerealiseerd.


Om het wegdek aan te brengen is er gebruik gemaakt van grijs karton (300 grams)en is vastgezet met dubbelzijdige tape.
Op bovenstaande foto is duidelijk te zien hoe deze zijn aangebracht.
Voordat het karton wordt aangebracht moet je dit natuurlijk wel van te voren op maat maken, anders wordt het aanbrengen een drama.
Ook doe je er verstandig aan om vóór het definitief aanbrengen, eerst wat markeerpunt aan te brengen, zodat dit bij het plaatsen duidelijk is.
Bij het aanbrengen van het karton wordt deze eerste op zijn plaats gelegd en vervolgens wordt telkens een strook dubbelzijdige tape ontdaan van de bovenste beschermlaag.
Strijk bij het aanbrengen naar 1 kant om plooien te minimaliseren.
Wissel voor de Faller baan.
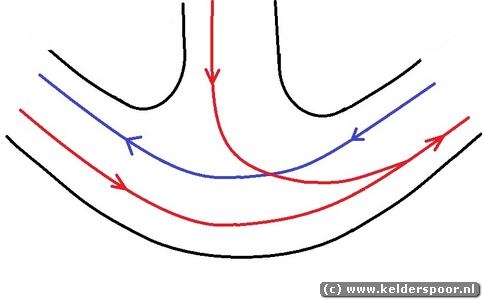
In het gedeelte dat tussen het station en de "keerlus" in zit, is een bushalte gepland en moet er een wissel in het wegdek worden gebouwd om van richting te kunnen veranderen.
Nu zijn er verschillende soorten wissels voor de Faller baan te koop, maar het nadeel van deze standaard types vind ik de abrupte afbuiging waarmee de voertuigen de afslag nemen.
Om deze rede is de wissel maar zelf gebouwd.
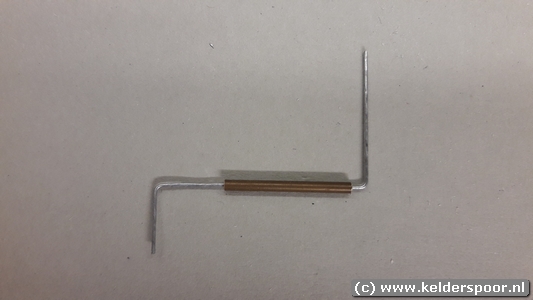
Om een mooie afbuiging te kunnen realiseren heb je lengte en een beperkte uitslag nodig en als het even kan moet de te volgen route ligt "buigen".
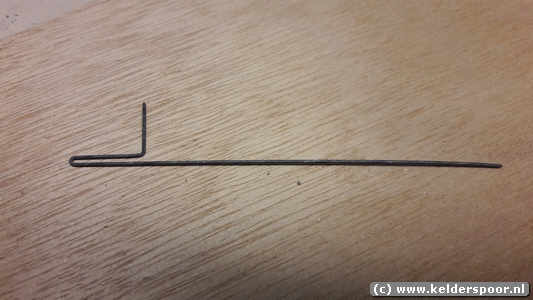
Nu is het buigen van een magneetstrip wat moeilijk leek mij, dus is er gekozen voor een rijdraad van metaal.
Eventueel kan deze dubbel worden uitgevoerd om er zeker van te zijn dat het voertuig de afbuiging goed kan volgen.
In mijn geval bleek dat hier niet nodig te zijn.
Het omzetten wordt verzorgd door een servo die straks niet alleen met hand is te bedienen, maar ook met DCC aangestuurd kan worden.
Om de voertuigen (de bus in dit geval) te kunnen laten stoppen, is er bij de stopplaats een elektromagneet onder het wegdek geplaatst.
Standaard worden de voertuigen van Faller aan de onderzijde voorzien van een reedcontact, die door een elektromagneet kan worden bediend om zo de motorstroom te onderbreken waardoor het voertuig stopt.
De bouw.
De bouw is eigenlijk heel simpel van opzet en eenvoudig uit te voeren.
Door zijn eenvoud is de wissel eigenlijk ook heel betrouwbaar, omdat er weinig fout kan gaan.
Daarnaast is er gekozen voor een servo aandrijving, omdat over het algemeen de servo aandrijving zeer betrouwbaar en ongevoelig voor vuil is.
Als eerste wordt de route afgetekend zoals de voertuigen moeten gaan rijden, doe dit voor zowel de rechtdoor- als de afbuigstand.
Frees nu eerst de baan uit voor de magneet strip voor de rechtdoor en afbuig situatie.
Zorg er hierbij voor dat de afbuigende lijn vloeiend verloopt.
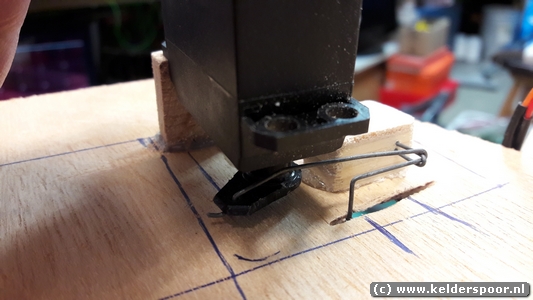
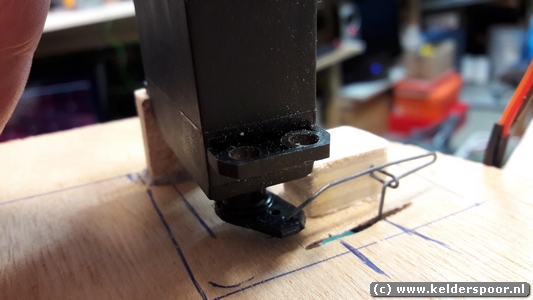
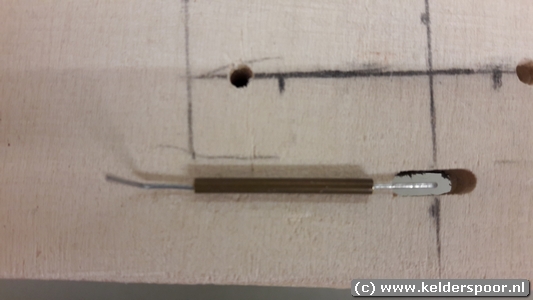
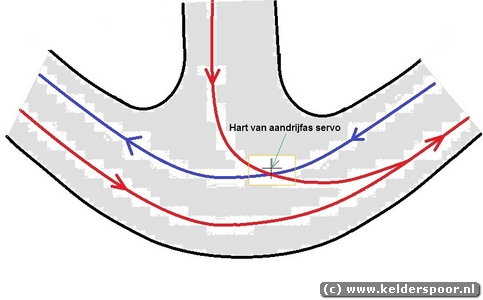
 Om te beginen moet voor het bewegende deel een driehoek worden uitgefreesd, die een iets grotere diepte heeft dan een rijdraad.
Om te beginen moet voor het bewegende deel een driehoek worden uitgefreesd, die een iets grotere diepte heeft dan een rijdraad.
De uitgefreesde driehoek (lengte en hoogte) bepalen in grote mate hoe het voertuig straks de afslag zal nemen.
Hoe groter de lengte, hoe geleidelijker de afbuiging. De hoogte van de driehoek wordt grotendeels bepaald door de uitslag die de servo kan maken.
Iets voor het knikpunt, dus nog voor het begin van de wissel, wordt een klein gaatje geboord met een diameter die even groot is als de rijdraad.
De foto laat goed zien wat de bedoeling is.
Aan het uiteinde van de driehoek wordt een sleuf uitgefreesd die door de plaat heen gaat en minimaal de lengte heeft van de uitslag van de rijdraad.
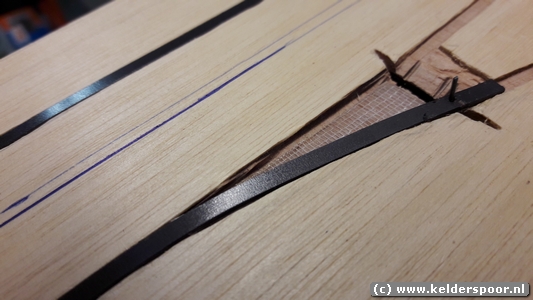
Voordat de rijdraad wordt gebogen en geplaatst, wordt er op de bodem van de driehoek een stukje gladde folie aangebracht om te voorkomen dat de rijdraad tijdens het omzetten kan blijven haken achter de oneffenheden in het triplex.
 In mijn geval is de folie vast gezet met een stukje dubbelzijdige tape, maar kan eventueel ook verlijmd worden.
In mijn geval is de folie vast gezet met een stukje dubbelzijdige tape, maar kan eventueel ook verlijmd worden.
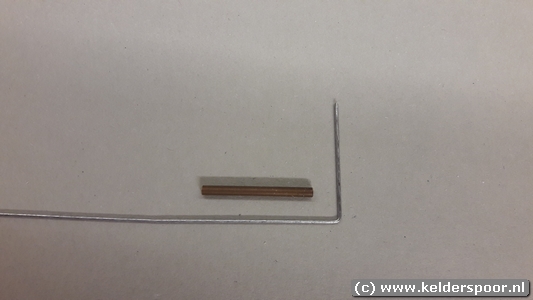
Vervolgens buigen we de rijdraad zodanig in een U vorm, dat deze door door de sleuf en het gat aan het begin van de wissel kan.
Zorg er hierbij voor dat de draad soepel kan bewegen en niet blijft haken in de sleuf.
Buig nu de rijdraad die door het klein gaatje gaat aan de onderzijde haaks om in de lengte richting van de magneetstripsleuf.
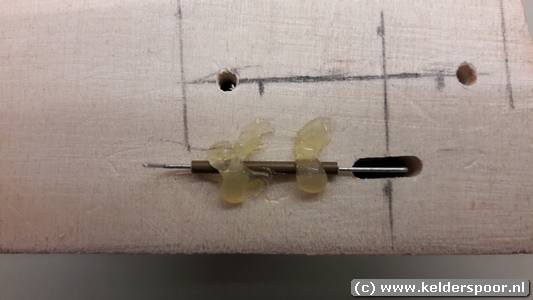
Breng vervolgens de magneetstrippen aan in de reeds uitgefreesde sleuven voor de magneetstrip.
De magneetstrippen moeten aansluiten op het draaipunt en het uiteinde van het beweegbare deel.
Probeer hierbij de speling tussen magneetstrip en rijdraad zo klein mogelijk te houden.
Als de rijdraad juist gemonteerd zit en soepel kan bewegen kan de aandrijving, in mijn geval een servo, gemonteerd worden.
Plaatsing servo.
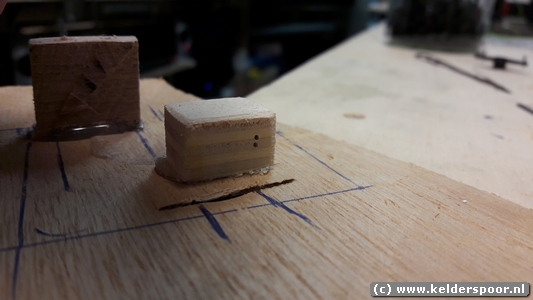
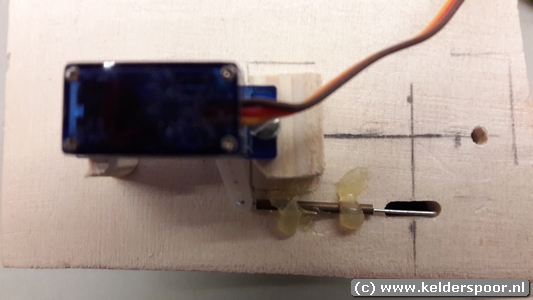
Omdat het wegdek van 4 mm dik triplex is gemaakt, kan de servo niet direct op de plaat gemonteerd worden.
Hiertoe wordt op de servo eerst een houten klosje van 25x35x10mm geschroefd.
Vervolgens kan de servo met het houten klosje op de triplex plaat worden gelijmd en wel zodanig, dat het uiteinde van de rijdraad door de arm van de servo volledig door de sleuf kan bewegen.
Bij het plaatsen moet je er rekening mee houden, dat indien de servo arm in het midden staat, deze ook in het midden van de sleuf moet zitten.
Zo is de uitslag naar beide zijde even groot.
Om de wissel betrouwbaar om te zetten, is het in dit geval nodig om de "pen" op twee plaatsen in de arm te borgen.
Daarom worden in de arm van de servo eerst twee kleine oogjes van draad gemaakt, waar later de draad van de wissel doorheen kan worden gestoken.
De foto laat zien wat de bedoeling is.
 Nu de wissel op zijn plaats zit, kan deze uitgetest worden.
Nu de wissel op zijn plaats zit, kan deze uitgetest worden.
Hiertoe worden de magneetstrippen en wissel afgedekt met één laag karton
Deze wordt tijdelijk vastgezet met een aantal punaises.
De uitslag kan worden gecontroleerd door de servo met de hand te verdraaien.
Indien nodig kan de draad nog worden bijgesteld.
Om te zien of de wissel goed werkt wordt eerst de wissel handmatig in de rechtdoor stand gezet.
Nu wordt er een Faller auto voor de wissel geplaatst en laten we hem over de wissel rijden.
Hetzelfde doen we als de wissel handmatig in de afbuigstand wordt gezet.
De slag (of hoek) die de arm van de servo moet maken om de wissel geheel om te zetten, kan straks eenvoudig met de servo decoder ingesteld worden.
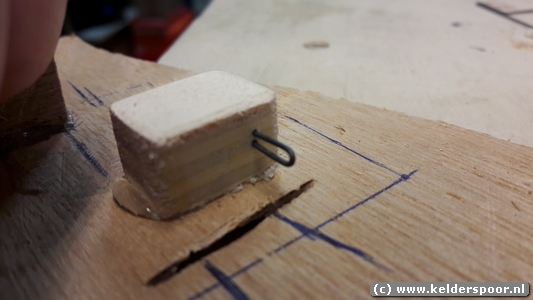
Om straks de bus te kunnen laten stoppen, dient er nog een stopmagneet aangebracht te worden.
Plaatsing stopmagneet.
 Om de bus te laten stoppen gebruiken we een elektromagneet.
Om de bus te laten stoppen gebruiken we een elektromagneet.
Een geschikte elektromagneet wordt geleverd door o.a. Faller onder artikelnummer 161675, maar kan ook van een oud PTT relais gemaakt worden.
Aangezien ik nog een aantal originele stopmagneten had liggen van Faller, hen ik deze hiervoor gebruikt.
De stopmagneet moet aan de rechterzijde van de magneetband of rijdraad worden geplaatst.

Omdat het magnetisch veld dat wordt opgewekt door de elektromagneet niet zo heel groot hoeft te zijn, kan deze onder de plaat triplex worden geplaatst en is er ook weinig spanning nodig.
Hierdoor is het verbruik natuurlijk ook erg laag en kan de elektromagneet ook permanent aan staan zonder dat deze heet wordt (verbrand).
De juiste positie bepalen wordt dan ook erg makkelijk door deze elektromagneet permanent onder spanning te zetten en deze op de plaats te houden waar we het voertuig willen laten stoppen.
Vervolgens laten we het voertuig erover heen rijden en kijken we of deze inderdaad op de juiste plek stopt.
Na het bepalen van de juiste positie tekenen we of waar deze moet komen.
Het vastzetten is gedaan door de beide uiteinde van de ijzere beugel vast te lijmen met het lijmpistool.
Natuurlijk gaan we de zaak eerst even testen voordat dit op de definitieve plaats komt te liggen.
Hiernaast nog even foto hoe het er uit ziet aan de onderzijde van de plaat triplex.
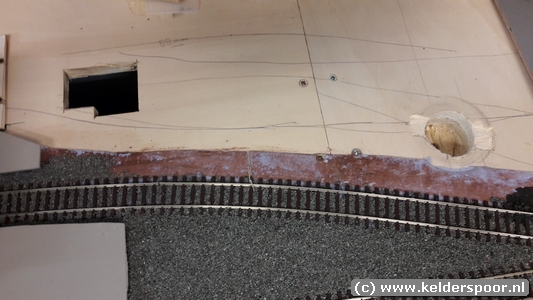
Voordat het op de definitieve plaats kan worden gemonteerd, moet de keerlus op zijn plaats worden gelegd en zullen er eerst nog gaten in de bodemplaat moeten worden gemaakt.
Deze gaten zijn bedoeld om de servomotor en stopmagneet te laten verdwijnen in de bodemplaat.
Hieronder een foto die de gaten laat zien in de bodemplaat.
Als dan de keerlus en de bushalte op zijn plaats liggen ziet het er zo uit.....

De twee delen liggen nog niet op een gelijke hoogte.
Bij de definitieve plaatsing worden deze twee delen op de onderplaat geschroefd.
Voor nu worden de delen tijdelijk even uitgelijnd.
Eerst maar eens even test rijden........
Zo te zien werkt het .................
Na de diverse test ritten met verschillende voertuigen konden we verder met de bouw.
Voor de verdere afbouw van het talud moeten we eerst de tunnelportalen voor de FallerCar baan gaan maken.
Ook deze zijn weer op de bekende wijze gemaakt van Ytong blokken, zie tunnelbouw, alleen de vorm en grote is wat anders dan bij de portalen voor het spoor.
Één van de tunnelportalen moest schuin gebouwd worden om het "verantwoord" en logisch er uit te laten zien.
Deze tunnelportalen bestaan uit twee losse delen die in elkaar geschoven kunnen worden.
Dit was namelijk veel makkelijker te maken dan twee ingangen uit één stuk.
Als eerste is er van karton een bodemprofiel opgemaakt met de loop van het wegdek.
Hiermee is de breedte van het portaal bepaald.
Vervolgens is de hoogte gemeten die nodig is om alle voertuigen door de tunnel te laten gaan.
Hieruit is er een profiel van karton gemaakt om de doorgang van het portaal te bepalen en dit overgezet op het stuk Ytong blok.
Ook de vorm van de boven boog is anders gemaakt dan bij een spoortunnelportaal.
Deze is wat vlakker en loopt in de ronding minder door.
Daarnaast zijn kleinere stenen uitgesneden dan dat bij de spoortunnels is gebruikt.
Hierdoor krijgt deze tunnel ingang voor verkeer een heel ander uiterlijk dan bij het spoor is toegepast.
Hieronder wat foto's van de vorderingen van het geheel.


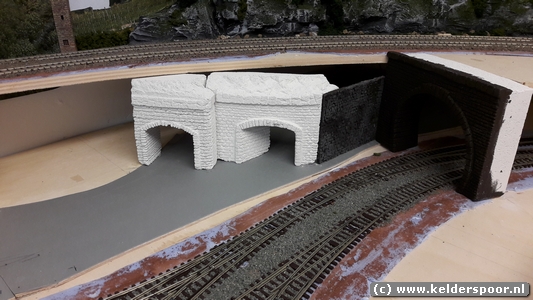

Tevens is ook het tunnelportaal van het spoor in dezelfde kleur meegenomen en is er boven op de tunnelportalen voor het verkeer een opbouw gemaakt die aansluit op het bovenliggende tracé.
Om het geheel af te maken zijn er ook achterwanden bij de tunnelportalen geplaatst.

Als laatste toevoeging is alvast een deel van de belijning aangebracht op het wegdek.
Ook is er een begin gemaakt voor de halte die na het station is gepland.
De constructie van deze portalen is zo gemaakt, dat deze ook uitneembaar is in geval er een voertuig de weg kwijt is.
In dat geval kun je, na het wegnemen van de portalen, met de hand en arm bij de keerlus komen.
De enige voorziening die nog moet worden gemaakt is dat de voertuigen nooit buiten de keerlus kunnen komen.
Dit wordt gerealiseerd door er een strook "architecten karton" van ca 2,5 cm langs op te plakken.
Daarmee voorkom je op eenvoudige wijze dat de voertuigen buiten het parcours kunnen raken en altijd zijn "terug te vinden".
De afbouw van de FallerCar keerlus.
Voor de verdere afbouw van het talud bij de toekomstige locloods en de keerlus voor de FallerCar baan is het aanbrengen van de bovenleiding bij het tunnelportaal van het spoor noodzakelijk.
Aangezien er in de tunnels geen bovenleiding wordt aangelegd, is het noodzakelijk dat de pantografen worden opgevangen voordat deze de tunnel verlaten.


Bij het inrijden van de tunnel wordt de pantograaf na een ca 10 cm op een nette manier "losgelaten" van de bovenleiding.
In de tunnels is er rekening mee gehouden dat de pantografen in de hoogste stand altijd vrije doorgang hebben.
Voor het oog lijkt het alsof de bovenleiding in de tunnels doorloopt, maar is dus niet het geval.
Al eerder is beschreven hoe dit eenvoudig is op te lossen, zie hiervoor tunnelbouw museumspoorlijn.
Bij deze is het echter nog iets ingewikkelder omdat er bij het in en uitrijden van de tunnel nog een overloop van buiten naar het binnenspoor is geplaatst.
Deze overloop ligt deels in de tunnel, waardoor er een extra rijdraad moet worden aangebracht, wat de constructie wat moeilijker maakt.
Doordat er weinig zicht is op de constructie die in de tunnel wordt geplaatst, moet er wat meer op gevoel worden gewerkt dan normaal.
Achteraf had dit beter van te voren gerealiseerd moeten worden.
Aan de andere kant is het natuurlijk een extra uitdaging om dit voor elkaar te krijgen.
De klus was dan ook niet in één avond geklaard en het koste nogal wat moeite om het goed voor elkaar te krijgen.
Het grootste probleem was de bereikbaarheid om de bovenleiding in de tunnel te solderen.


Hoe is het gedaan...
Vlak voor het tunnelportaal zijn er twee masten geplaatst, één voor de buitenspoor en één voor de binnenspoor.
De opvolgende mast voor het buitenspoor is aan het begin van meegebogen wissel van de overloop geplaatst.
Bij het binnenspoor staat deze aan het einde van de uitrijwissel van het station.
De masten zijn zo geplaatst, dat de rijdraden binnen de maximale uitwijking van de pantograaf blijven.
De rijdraad die vanaf de mast voor het tunnelportaal de tunnel in loopt, hangt nog voor ongeveer 8cm nog op gelijke hoogte en loopt dan de laatste 8cm langzaam naar boven, zodat de pathograaf rustig opgevangen of losgelaten kan worden.
Voor het binnenspoor is dit op dezelfde manier gedaan.
Voor de bevestiging van deze draden is gebruik gemaakt van een stuk gestripte VD draad van 2,5mm en is in een L vorm gebogen.
Deze "L" wordt als het ware onderste boven geplaatst waarbij het verticale been aan de zijde van de binnenspoor staat.
Aan het andere uiteinde van de "L" (horizontale deel) is een oog gebogen zodat deze in de bovenplaat kan worden vastgeschroefd.
De hoogte is ruim voldoende om de patograven vrije doorgang te geven.
Aan deze VD draad zijn de uiteinde van de rijdraden gesoldeerd.
Om te voorkomen dat de VD draad mee buigt als gevolg van de trekkracht van de draden, wordt er bij het verticale been een klein schroef aan de zijde van de tunnelportaal geplaatst
Voor de overloop wissels is de rijdraad aan het buitenspoor geplaatste mast gemaakt en loopt deels parallel met de reeds aangebrachte rijdraad.
In het hart van het afbuigende spoor wordt deze draad met een kleine knik omgebogen zodat deze de route van de overloop verder volgt.
Ook deze draad blijft de eerste ca 8cm op gelijke hoogte om vervolgens de laatste 8cm naar boven af te buigen.
Ook dit uiteinde wordt aan de VD draad gesoldeerd.


Om meer stabiliteit te hebben in de bovenleiding die in de overloop zit, zijn er twee korte verbindingsdraden aangebracht tussen de rijdraad van het buitenspoor en de rijdraad boven de overloop.
Dit wordt weliswaar nooit in werkelijkheid gedaan, maar is gewoon een creatieve oplossing om te voorkomen dat de pantografen kunnen vastlopen in de bovenleiding.
Overigens is de draaddikte ook niet op schaal.
Als je dit wel wilt doen betekend dit dat er (voor H0) een draaddikte van 0,13mm tot 0,27mm (afhankelijk van het land) gebruikt moet worden.
Hier kan een modelpantograaf nooit tegen aan lopen omdat de veerdruk dusdanig hoog is, dat de rijdraden van de bovenleiding compleet naar boven worden gedrukt.


De zelfbouw Faller Car wissel verbeterd.
Hoewel de reeds gemaakte zelfbouw wissel voor het Faller Car systeem goed functioneerde, is gebleken dat vooral de wat kleinere en lichte voertuigen nogal eens de weg kwijt raakte.
Nadat de zaak wat nauwkeuriger was bekeken, bleek dit vooral te gebeuren op het moment dat de magneet van de stuurinrichting op de overgang van de magneetband naar de draad van de wissel heen ging.
Door een kleine oneffenheid kan de richting van het voertuig dan iets afwijken hetgeen regelmatig resulteerde in het kwijtraken van de draad.
Ook zijn dit soort voertuigen vaak uitgerust met een kleinere magneet waar door er wat minder “grip” is op de geleider draad.
Rede om te zoeken naar een oplossing waarbij ook de kleine voertuigen de route kunnen blijven volgen.
En dat is gelukt.
Voorheen dacht ik altijd dat de magneetband moeilijk was te “verbuigen”, maar door de lengte van de wissel bleek dit heel erg mee te vallen.
Door de draad te vervangen door een stuk magneetband, kan de magneet van de stuurinrichting de “route” veel beter volgen.
Het enige probleem was hoe bevestig ik de magneet band aan de servo arm.
Na wat experimenten bleek dat de oplossing eigenlijk heel simpel is.
Gewoon een gaatje in de magneetband maken met een diameter die gelijk is aan die van de draaddikte.
Hierdoor steek je gewoon de pen van de aandrijving.
Wat ook anders gerealiseerd moest worden, was dat de beweging van de pen op gelijke hoogte moest blijven bij het omzetten van de wissel.
De magneetband is niet zo dik, dus kan de pen makkelijk uit het gaatje "vallen".
De truc die we hebben toegepast lijkt een beetje op de servo aandrijving die bij het museumspoor is toegepast.
Door de servo in een andere positie te monteren en de “aandrijfstang” in de horizontale beweging te ondersteunen kon dit vrij eenvoudig worden gerealiseerd.
De servo moet nu niet "staand" maar "plat" gemonteerd worden.
Als eerste is de servo gedemonteerd en wordt het bestaande montage blokje verwijderd.
Het blokje wordt ontdaan van oude lijm resten en kan weer hergebruikt worden door deze rechtop te lijmen op de onderplaat.

De ondersteuning bestaat hier niet uit een buisje, maar uit een kleine lus, waar de horizontale stang doorheen loopt.
Tevens geeft dit de drijfstang een beetje spelling in horizontale richting.
Dit laatste was weer nodig omdat de servo arm een ronde beweging maakt.
Door een buis ontstaat juist een starre beweging, die in dit geval de nodige belemmering veroorzaakt in de beweging.
Om de lus te maken is gebruik gemaakt van hetzelfde draad als die van de aandrijfstang en is niets anders dan een stukje ijzerdraad wat in een U vorm is gebogen.

Ik heb draad gebruikt zoals dat gebruikt wordt om planten op te binden, echter niet de geplastificeerde maar verzinkte uitvoering.
Om de draad mooi recht en wat steviger te krijgen, kun je deze even met de boormachine spannen.
Ook de aandrijfstang krijgt nu een andere vorm.
Om de geleiderlus te plaatsen, is er een klein blokje hout gebruikt dat voorzien is van twee klein gaatjes die net iets kleiner zijn dan de doorsnede van de draad.
Dit blokje wordt geplaatst aan het einde van de sleuf waarin de aandrijfstang moet gaan bewegen.
Doordat de gaatjes net iets kleiner zijn, wordt de lus goed geklemd in het hout.
Eventueel kun je deze vastzetten met een druppel (hout)lijm.
Door de lus wordt later de aandrijfstang geplaatst.
De aandrijfstang heeft aan het uiteinde een lus die gelijk of groter moet zijn dan de horizontale beweging die de stang minimaal moet kunnen maken.
Gezien de sleuf iets langer is dan nodig is heb ik deze lengte aangehouden.
Vervolgens wordt de servo geplaatst.
Alvorens de aandrijfstang te monteren wordt eerst de servo opnieuw ingesteld om de juiste uitslag van de arm te krijgen.
Tevens is de servo arm wat aangepast, de onnodige (en ongebruikte) armen zijn verwijderd.
Nu kan de aandrijfstang worden geplaatst.
Na het plaatsen van de aandrijfstang wordt de servo even kort getest om na te gaan of de uitslag voldoende/onvoldoende is en zo nodig even bijgesteld.
Indien dit goed is kan de magneetstrip worden aangebracht.
De totale lengte van deze strip loop van het begin van onderplaat tot aan het einde van de afbuigende sectie, in mijn geval ongeveer 12 cm.
De strip voor het vast deel van de afbuigende route en de rechtdoor route blijven hiervoor ongewijzigd.
De overgang tussen het buigbare deel en het vaste deel bedraagt minder dan 1 mm.
In het buigbare deel wordt een klein gaatje geboord zodat de aandrijfstang hier net doorheen kan, in mijn geval 0,6mm.
Het uiteinde van de aandrijfstang, dus het deel wat door de magneetstrip steekt, is lang genoeg en kan laten op lengte gemaakt worden.

De folie die gebruikt is bij de vorige uitvoering met stang aandrijving, is blijven zitten.
Ook de beschermfolie aan de plak zijde van de magneetstrip laten we bij het buigzame deel zitten.
Voor het vaste deel wordt deze wel verwijderd om deze in de sleuf te kunnen plakken.
Tijd om even de wissel te testen.
Als alles goed is kan het deel van de aandrijfstang wat door de magneetstrip steek worden afgeknipt en kan het wegdek (gewoon karton) weer worden aangebracht.
Na het aanbrengen natuurlijk even live getest.
Als laatste is het deel weer terug geplaatst in de baan.
Weer een hele klus, maar nu werkt het feilloos voor zowel grote als kleine voertuigen.
Doortrekken van de Faller Car baan.
De volgende stap was het doortrekken van de Faller Car baan.
Dit is het deel wat na de spoorbrug richting helix komt te liggen.
Oorspronkelijk bestond het plan om deze weg vanaf de brug te laten afbuigen en onder de parade baan enigszins te laten stijgen.
Vervolgens zou de weg weer naar buiten komen en vlak voor het tunnelportaal van het spoor via een brug het spoor te laten oversteken.
Dit plan bleek echter moeilijk te realiseren te zijn.
Met name de hoogte van de voertuigen bleek een bottleneck te zijn.
Nu is er besloten om de FallerCar baan achter het station door te leggen en de naast het tunnelportaal van het spoor een in/uitgang voor de FallerCar baan te maken.
Om dit te kunnen realiseren moest de bovenplaat van de helix tijdelijk worden weggenomen en moest er naast het spoor van de helix ruimte gemaakt worden voor een weg doorgang.


Om deze ruimte te maken, is het nodig dat het spoor ca 5 cm wordt verlegd.
Hierdoor veranderd de ingang naar de helix, maar levert geen noemenswaardige problemen op.
Alleen de opvang voor de bovenleiding moet wat aangepast worden.
Na deze aanpassing is er ruimte genoeg voor een tweebaansweg voor de FallerCar baan.
Achter het station is het een recht stuk baan en is relatief eenvoudig te maken.
Het probleem is echter dat de trap partij aan de achterzijde van het stationsgebouw voor een goede doorgang van de Faller auto's net iets te ver uitsteekt.
Hiervoor is er een gedeelte van de trap in het middendeel weggezaagd.

Zoals je wellicht eerder hebt gelezen, is de onderbouw van de Faller Car baan gemaakt op triplex plaat en wordt er voor de magneetstrip een sleuf in de plaat gevreesd.
Voorheen heb je ook kunnen lezen dat deze sleuf werd gemaakt met een aantal slijp schijfjes die op elkaar waren gemonteerd.
Omdat er nog het nodige gefreesd moet worden is er een stukje gereedschap aangeschaft van Proxxon.
Deze maakt het mogelijk om van een gewone handboor van Proxxon een bovenfrees te maken.
Ook wordt hierbij een handige geleider geleverd zodat de sleuven mooi recht en parallel aan de zijkant uitgefreesd kunnen worden.
De instelling voor de diepte kan worden vast gezet en hoeft maar één maal ingesteld te worden.
Na het instellen van 1,5 mm diepte moet alleen de afstand van de geleider van de rand tot het hart van de sleuf nog ingesteld worden.
Gezien de weg achter het station mooi recht loopt, was dit het uitgelezen moment om deze tool eens te gaan gebruiken, en met een mooi resultaat.
Doordat de rand van de plaat mooi recht loop, was het een koud kunstje om met behulp van de geleider een strakke sleuf voor de magneetband uit te frezen.
Bij bochten werk is na het aftekenen van het "magneetspoor" de sleuf ook met een vrees aan te brengen zonder geleider.
Dit vereist echter wel een vaste hand met deze tool.


De bocht die na dit rechte stuk komt is op deze manier uitgefreesd.
Echter met dien verstande dat de magneetstrip voor de binnen bocht iets meer naar het midden ligt en voor de buiten bocht iets meer naar buiten.
Dit in verband met het overhangen bij aanhangers en lange voertuigen in bochten.
De hart-hart afstand van de magneetstrip is ongeveer 40mm, hetgeen ruim voldoende is om de voertuigen te laten passeren.
Het wegdek is in totaal zo'n 95mm breed en bied voldoende speelruimte om dit te kunnen realiseren.
Nadat de sleuven waren uitgefreesd, is de magneetband aangebracht.
De magneetband past precies in de uitgefreesde sleuf en komt op gelijke hoogte van triplex te liggen.
Om de magneetstrip vast te zetten, is er wat onverdunde houtlijm gebruikt, maar er zijn er ook die zijn voorzien van een dubbelzijdig plak strook.
Hierbij moet je er wel op letten dat de ondergrond stof en vetvrij moet zijn voor een goede hechting.
Vervolgens zijn er stroken dubbelzijdig kleefband aangebracht op de triplex plaat voor het aanbrengen van het wegdek.
Het uiteindelijke wegdek is uit grote vellen grijs karton gesneden (voor de rechte stukken) of geknipt (bij het bochtenwerk).
Nadat het wegdek mooi op maat was gemaakt is de bovenlaag van het dubbelzijdige kleefband verwijderd en is het wegdek aangebracht.
Om te testen of alles goed zat is het station weer op zijn plaats gezet en is er proef gereden....
En zoals je ziet in het filmpje rijdt het uitstekend.
Keer terug naar menu.
De Faller Car baan verlaat het station.
Nadat het stuk achter het station en toegangsweg talloze malen was getest en alles goed blijk te rijden, kan begonnen worden met het vervolg van de baan.
De weg vervolgt zich en zal het spoor moeten oversteken.
Dit kan op drie manieren plaatsvinden:
1 - met een brug.
2 - met een tunnel
3 - met een overweg.
De uitvoering met een brug en tunnel is technisch niet mogelijk omdat het te winnen hoogteverschil dusdanig is dat dit op de afstand van ongeveer 40 cm niet uitvoerbaar is.
Er zou dan een helling van ongeveer 25% gebouwd moeten worden (stijging van 10 cm over 40cm).
Blijft dus alleen de overweg als optie over.
Hoe dit verder tot stand is gekomen kun je lezen in de rubriek overweg bouw onder het tabblad "Scenery".

Keer terug naar menu.
De aansluiting naar de stad.
Nadat we de overweg voorbij zijn wordt de Faller Car baan door gelegd naar de stad.
Direct na de overweg is er een aansluiting vanuit het bergdorpje "Unterkellerberg".
Het ligt in de bedoeling dat de Faller auto's alleen richting stad kunnen.
Er is echter rekening gehouden met de mogelijkheid dat er wel Faller auto's vanuit dit dorpje richting stad kunnen rijden.
Dit is al reeds besproken in de rubriek overweg bouw onder het tabblad "Scenery".
Hier komen dus twee magneetstrips bij elkaar.
Het is vanuit deze splitsing niet mogelijk dat de Faller auto's vanuit de stadt hier het dopje in kunnen.
Hiervoor wordt een nieuwe afslag gemaakt.


Na deze afslag gaat de weg vervolgens naar beneden om op het "0" niveau van de de stad uit te komen.
Net voordat het "0"niveau wordt bereikt, is er een afslag om met de Faller auto's straks naar het bergdorpje "Unterkellerberg" te kunnen.
Hier wordt weer een wissel gebouwd om dit mogelijk te maken.
Nieuw soort wissel.
Bij de bouw van deze wissel is weer een afwijkende methode gebruikt en is nog eenvoudiger te maken dan dat bij de voorgaande wissel is besproken.
Opnieuw maken we hierbij gebruik van een servo, echter van een mini servo.
Deze is qua volume ongeveer een kwart van diegene die we hiervoor hebben gebruikt, is net zo snel/traag, heeft dezelfde maximale uitslag en is net zo sterk.
Het enige wat echt anders is is zijn omvang en de lengte van de arm.
Deze lengte is niet zo relevant, het gaat er tenslotte maar om een kleine afstand die moet worden overbrugt ca 15 mm).
Naarmate de arm langer wordt moet de verdraaiing minder zijn.
Dus in zekere zin heeft een kortere arm hier ook nog eens zijn voordeel, de verdraaiing is groter dus kan de standaard instelling (nagenoeg) ongewijzigd blijven.
Hoe is deze gemaakt.
Om te beginnen is het hele wissel deel uit een stuk populieren triplex van 12mm dik gemaakt.
Maar je kunt evengoed dunner materiaal gebruiken, bijvoorbeeld 4mm dik.
Omdat hier wat dikker materiaal gebruikt is moeten we wat extra dingen doen om de aansluiting op de dunnere plaat (4 mm) goed te laten verlopen.
In het wissel deel zit niet alleen de afbuiging maar ook het deel van het tegemoet komende verkeer.
Als eerste is er een stuk populieren triplex gezaagd van 120mm x 150mm.
Het uiteinde loopt i.v.m de afslag enigszins rond en blijft er ongeveer 110mm ruimte over voor de weg, hetgeen ruim voldoende is.
Omdat de plaat die moet aansluiten op de wissel dunner is dan de het wissel deel zelf, wordt er aan de uiteinde van de wissel een rand uitgefreesd met een diepte, die gelijk is aan de dikte van de plaat die moet aansluiten (4mm).
(dit is dus niet nodig als het wissel deel even dik is)
Nadat het deel klaar is wordt de route uitgezet zoals de magneetband moet gaan lopen, inclusief en afbuiging zoals die gemaakt moet gaan worden
Daarna worden de sleuven voor de magneetband uitgefreesd, samen met het deel waar de magneetband moet gaan buigen
Na het uitfrezen van de sleuven en het wissel deel, wordt er aan het uiteinde van het wissel deel een sleuf door en door gevreesd over de hele breedte van het wissel deel.
Hier moet namelijk de pen of as komen dit later de magneetband kan verplaatsen van de rechtdoor stand naar de afbuig stand.


Na het frees werk wordt in het deel waar de magneetband zich gaat bewegen een dun plaatje karton of mica aangebracht, om de magneetband soepel te laten bewegen.
Oneffenheden kunnen de beweging van de magneetband namelijk makkelijk verstoren.
Na het frees werk en het aanbrengen van het karton of mica worden de magneetbanden aangebracht, waarbij het buigend deel de lengte krijgt van de rechtdoor stand.
Aan de onderzijde moet de servomotor worden gemonteerd.
Waar je deze plaats is niet zo belangrijk, het makkelijkste is dit in het verlengde van de sluif waarin de aandrijfas straks moet gaan bewegen.
Om de arm vrij te kunnen laten bewegen en de servo met de aandrijving tegen de plaat aan komt, moeten er wat blokjes hout worden geplaatst waarop de servo kan worden gemonteerd.
De hoogte bedroeg in ons geval ca 15mm, maar kan per type servo natuurlijk wat verschillen.
De servo wordt op de blokjes geschroefd en wordt straks zo compleet gepositioneerd op de onderplaat.
De volgende fase is het buigen van de aandrijfstang.
Het deel van de stang dat tussen de sleuf en de aandrijf arm van de servo komt, wordt door een hol buisje geleid.
Dit buisje was in ons geval ongeveer 40mm lang.
De aandrijfstang is gemaakt uit een stukje ijzerdraad dat gebruikt wordt om gaas vast te zetten en is ca 0,7mm dik en heeft een lengte van ca 80mm.
De buis die gebruikt is voor de geleiding heeft een binnendiameter van 1 mm en is dus groot genoeg voor de draad.

Om de draad mooi recht te krijgen hebben we de draad even in de kop van de accu boormachine gespannen en strak getrokken met een tang.
Deze draad is bewust wat langer genomen (ca 300mm) dan de 80mm die we nodig hebben om het een beetje handelbaarder te maken.
Vervolgens laat je de machine even draaien (ca 20 omwentelingen op 150mm draad) en de draad wordt zo mooi recht.
Van de mooie rechte draad knippen we ca 80 mm af die we gaan gebruiken.
We buigen nu op ongeveer 20mm van het einde van de draad deze haaks om en schuiven het buisje over de draad.
Duw het omgebogen deel van de draad tegen de buisje en plaats het omgebogen deel in de sleuf voor de aandrijving.
Duw nu de draad naar het andere uiteinde van de sleuf en buig ca 10 mm verder dan aan de andere zijde van het buisje de draad haaks om naar boven.
Neem nu de draad met het buisje weg en controleer of de ombuiging mooi haaks op elkaar staan, eventueel nog corrigeren.
Indien ze t.o.v. elkaar mooi haaks staan boren we in de magneetstrip een klein gaatje van 0,6mm op de plaats waar de aandrijfas moet komen.
Vervolgens plaatsen we de aandrijfstang in de sleuf en steken deze door het gaatje van de magneetstrip.
Controleer nu met de hand of de magneetstrip soepel kan bewegen.
Als dit soepel kan bewegen lijmen we het buisje vast op de onderbouw met behulp van het lijmpistool.
Zorg er hierbij voor dat het buisje pas begint op ca 2mm vanaf de rand van de sleuf.
De laatste stap is het plaatsen van de servo.
Als eerste plaatsen we de arm op de servo, waarbij we ervoor moeten zorgen dat de servo stand ongeveer in het midden is.
Als het goed is staat de arm nu haaks op de servo en kan deze naar beide zijde even veel bewegen.
Plaats de aandrijfstang in het midden van de sleuf en het andere uiteinde van de aandrijfstang in het gaatje in de arm van de servo.
Teken de blokjes, waar de servo op gemonteerd zit, op de plaat af en nemen de servo weer weg.
Vervolgen boren we een klein gaatje (ca 2,5mm)in het midden van het afgetekende deel van het blokje.
Aan de andere zijde wordt met een verzinking boor een verzinkt gat gemaakt, zodat de bovenzijde van de schroef mooi onder het oppervlak blijft.
Nu plaatsen we de servo weer terug en schroeven hem met één schroef vanaf de andere zijde vast.
We sluiten de servo aan op de decoder en testen op de uitslag goed is en of de magneetstrip makkelijk beweegt van de rechtdoor naar de afbuigstand.
Buiten het feit dat de servo decoder instellingen aangepast kunnen worden kun je eenvoudig de servo na stellen door hem een klein stukje te verdraaien, omdat deze maar met 1 schroef vast zit.

En zo is er weer een ander soort aandrijving tot stand gekomen die eenvoudig zelf gemaakt kan worden.
Neem de lengte van de te buigen magneetstrip niet te kort.
Het geeft niet alleen een mooier beeld bij het afslaan van het voertuig, maar indien dit te kort is, buigt de magneetstrip wat moeilijk en kan bol komen te staan tijdens het buigen.
Indien alles is gecontroleerd en getest, kan de wissel worden ingebouwd en kunnen we verder met de verdere bouw van de Faller Car baan.

Succes met het eventuele nabouwen van deze wissel.
De opritten vanuit de stad zijn gemaakt van 4mm triplex en daar waar de magneetband moet komen te liggen zijn er weer sleuven uitgefreesd.
Doordat het triplex door zijn geringe dikte nogal doorbuigt, is de onderzijde versterkt door een lat van boven neer beneden te plaatsen.
Een latje van 15 mm is al voldoende om hem stevig te maken.
Keer terug naar menu.
Opnieuw een nieuwe wissel.
Soms lijkt het dat je op de goede weg bent en blijkt achteraf dat een keuze niet zo slim is geweest.
Zo verging het ook op de kruising van de hoofdweg Elstadt-Sonderndorf naar Unterkellerberg.
De bedoeling was dat het autoverkeer komende vanuit "Unterkellerberg" zich weer netjes naar Elstadt zou gaan begeven.
We hadden dit getest met een bus voertuig en dat werkte prima.
Echter met kleine voertuigen ging het regelmatig mis en belande de voertuigen aan de verkeerde zijde van de weg.
Ook bleek dat het verkeer vanuit Elststadt zich nog wel eens "spontaan" een weg zocht naar Unterkellerberg en wel aan de verkeerde kant van de weg.
Na veel proberen met verleggen en aanpassen van de magneetband en de een stuk magneetband vervangen door een rijdraad werd het probleem duidelijk.
De hoek waaronder deze elkaar kruisen bleek gewoon te klein te zijn, waardoor de voertuigen vrij eenvoudig een verkeerde route konden gaan nemen.
Dat deze hoek erg klein is heeft te maken dat deze splitsing zich in een bocht bevind.
Je kunt het een beetje vergelijken met een meegebogen wissel bij het spoor.
De enige oplossing was het aanleggen van een wissel die de magneetband in de juiste richting zou leggen.
Opnieuw moest er dus een nieuw soort wissel gebouwd gaan worden.
De bouw bleek echter vrij simpel te zijn.
Dit keer moest de volledige magneetband gedraaid worden in de juiste richting.
De lengte waarover de draaing plaatsvind is vrij lang genomen (ca 50mm), om te voorkomen dat de magneet van de stuurinrichting alsnog een andere richting op zou gaan.
Ook hier is weer gebruik gemaakt van een servo aandrijving.
Er is geen gebruik gemaakt van de bijgeleverde armen voor de servo, maar deze is zelf gemaakt van een stukje styreen plaat van 1,5 mm dikte.
Als eerste moet de plaats bepaald worden waar de arm straks moet gaan draaien.
Hiervoor moet eerst het gat geboord worden waar de as van de servo moet komen.
Om te voorkomen dat de bevestigingschroef, voor het vastzetten van de arm in de aandrijfas, onder de magneetsstrip komt, moet het gat in iets uit het midden worden geplaatst.
Omdat de magneetstrip met een kleine bocht gaat lopen (beide routes lopen hier namelijk in een bocht), is het geen problleem dat de bevestigingschroef naast de magneetstrip komt te zitten.
Het gat in de bodemplaat moet uiteindelijk 10mm in doorsnede zijn, omdat hier de hals van de servo met de aandrijfas in moet passen.
Door lijnen te trekken vanaf de plaats waar de magneetband stopt naar de plaats waar de magneetband weer verder gaat, vindt je het snijpunt van de twee routes.
Naast de kruising van deze lijnen komt het draaipunt te liggen.
Een afstand van de dikte van de schroefkop is al voldoen, wat betekend dat het gat zo'n 3 mm naast het snijpunt komt te liggen.

Vanwege de dikte van de styreenplaat moest eerst het gedeelte waarin de arm moet bewegen uitgefreesd worden in de onderplaat.
Zo kan de magneetband straks onder het definiteve wegdek vrij en soepel bewegen.
Dit uitfrezen is geen enkel probleem omdat de plaatdikte hier 12 mm is, en blijft er nog voldoende dikte over voor de benodigde stabiliteit.
Omdat de afstand vanaf de behuizing van de servo tot aan de bovenzijde van de aandrijfas slechts 7mm is, moet er aan de onderzijde van de plaat ook een stukje weg gefreesd worden, zodat de servo iets verzonken in de plaat valt.
Indien alles past, kan vervolgens de servo onder de plaat geschroefd worden en wordt de arm met de magneetband geplaatst.
Deze arm moet in totaal enkele milimeters korter zijn dan de benodigde magneetband, om de arm met magneetband nog soepel te kunnen laten bewegen.
De beweegbare magneetband wordt echter nog voldoende ondersteund.
Om te voorkomen dat de magneetstrip op den duur los kan raken, is deze niet met een plakstrip vast gezet maar met wat lijm.
Omdat deze "kruising" niet in een rechte lijn verloopt, is de magnetstrip in een kleine radius geplaatst.
Daarnaast ligt het draaipunt naast de magneetband, hetgeen de bevestiging weer vereenvoudigd.
Een ander voordeel is, dat de arm makelijk versteld kan worden bij het mechanisch afstellen op de servo.
Doordat de radius van de magneetband in de rechtdoorstand en afbuigstand niet verandert, is de aansluitingen van de magneetbanden naar de wissel iets aangepast om een mooier verloop te krijgen.


Hieronder een filmpje over het functioneren van de nieuwe wissel nog zonder wegdek.
De servo wordt aangestuurd met een servodecoder van Etecmo, die ook de mogelijkheid heeft om met handbediening te werken.
Om te voorkomen dat er een voertuig over de wissel gaat als deze in een verkeerde stand staat, zijn er stopspoelen aangebracht voor de wissel.
Door de spoel in te schakelen als de wissel voor de rijrichting verkeerd staat, voorkom je dat het voetuig de weg kwijtraakt en heb je tevens een soort van voorrangsregel ingebouwd.
Zo blijft het voertuig uit de andere richting staan om een botsing te vermijden.
Automatische aansturing van de nieuwe wissel.
Gezien de omvang van dit deel is er een sub menu gemaakt.
Kies hier het onderdeel:
Het gebruik van sensoren.
Na het plaatsen van de nieuwe wissel in de hoofdweg Elstadt-Sonderndorf naar Unterkellerberg moet de servo natuurlijk op een juiste wijze aangestuurd worden.
Aangezien we niet op de Faller Car baan gebruik gaan maken van computerbesturing, gaan we dit oplossen met een "ouderwetse" analoge methode.
Voor het aansturen van de servo's worden servodecoders gebruikt, waarbij het omzetten van de faller wissels zowel met DCC als met een drukknop gedaan kan worden.
De drukknop kunnen we simpelweg vervangen door een relais contact.
Door ervoor te zorgen dat het relais slechts kortstondig wordt aangestuurd, kunnen we de wisselstand veranderen.
Tevens wordt in de andere route de stopspoel geactiveerd om te voorkomen dat de wissel in de verkeerde stand wordt gezet of dat er een botsing kan ontstaan.
De gehele aansturing doen we doormiddel van een simpel stukje elektronica.
Om te beginnen heeft de elektronica informatie nodig of zich ergens een voertuig bevindt.
Met name de positie van naderende voertuigen in het gedeelte waar de wissel zich bevindt is van belang.
Om dit te kunnen realiseren zijn er sensoren in het wegdek geplaatst die de aanwezigheid van een voertuig kunnen detecteren.
De gebruikte sensoren zijn de zogenaamde Hall-sensoren.
 Een hall-sensor reageerd op de aanwezigheid van een magnetisch veld.
Een hall-sensor reageerd op de aanwezigheid van een magnetisch veld.
Nu zijn er verschillende soorten hall-sensoren, hier is gebruik gemaakt van een omnipolair type.
Deze hall-sensor reageerd op zowel een noord als zuid pool van een magneet op eenzelfde manier.
Met andere woorden, de uitgang wordt aktief als er een noord- of zuidpool van een magneet in de buurt komt.
Er zijn bijvoorbeeld ook sensoren waabij de uitgang bij een zuid pool aktief en bij een noord pool weer inaktief worden.
In eerste instantie lag het in de bedoeling om een extra magneet in het voertuig te plaatsen om dit te kunnen realiseren.
Maar omdat onder elk voertuig al een magneet zit die de draad of magneetband volgt, is eerst getest of dit ook zonder een extra magneet zou kunnen werken.
Een extra magneet is dan niet meer nodig.
Met name bij kleine voertuigen ( personenauto's ) is door een beperkte ruimte dit een bijkomend voordeel.
In een proef opstelling is als eerste een Hall-sensor pal naast de rijdraad geplaatst, om na te gaan of dan elk voertuig gedetecteerd wordt die de sensor passeert.
Dit werkte wonderwel zeer goed.
Aangezien we met magneetband werken, krijgen we te maken met een ander fenomeen, namelijk het magnetisch veld van de magneetband zelf.
Het gevolg hierbij is, dat door het reeds aanwezige magnetische veld, de sensor al geactiveerd is en geen magneet meer van het voertuig kan detecteren.
Hiervoor moesten we dus iets anders bedenken.
Als eerste is geprobeerd om een stukje magneetband te verwijderen (ca 15mm in de test fase) en de hall-sensor hier tussen te plaatsen.
Dit functioneerde meestal wel, maar miste ook nog wel eens een passerende magneet.
De rede dat dit gebeurde lag in het feit dat, aan het uiteinde van de magneetband, de sleper met de magneet van het voertuig omhoog werd gedrukt,
Dit heeft te maken met met het magnetisch veld aan het einde van de magneetband.
Deze loopt anders dan over de rest van de magneetband.
Hier staan de noord polen (of de zuid polen) van het magnetisch veld van magneetband en de magneet op de sleper van het voertuig, tegen over elkaar en worden dan van elkaar weggedrukt.
Oorzaak is nu dat het magnetisch veld boven de sensor dusdanig zwak is, de sensor dit niet meer detecteerd.
Deze methode was dus niet betrouwbaar genoeg.
Om dit verschijnsel te elimineren is hiertoe in het onderbroken stukje magneetband een stukje rijdraad geplaatst, waarbij de sensor weer net naast de rijdraad zat.
Dit bleek prima te functioneren en het voertuig kon de route ook prima volgen zonder het spoor beister te raken.
De sleper bleef ook keurig op de rijdraad zitten.
Tevens is ook getest of het ook functioneerde indien de sensor onder de rijdraad zat.
Dit bleek evengoed storingvrij te funtioneren.
In alle gevallen is ook gebleken dat de richtingspositie van de sensor (een kleine) invloed heeft voor het goed functioneren.
Parallel of in de lengte richting van de rijdraad bleek het beste en het meest betrouwbaar te functioneren.
Dit maakte het plaatsen van deze sensoren nog wel even een dingetje, omdat ze vrij klein zijn en er ook nog eens 3 draden aan moeten komen, doe je dat niet zo maar even.
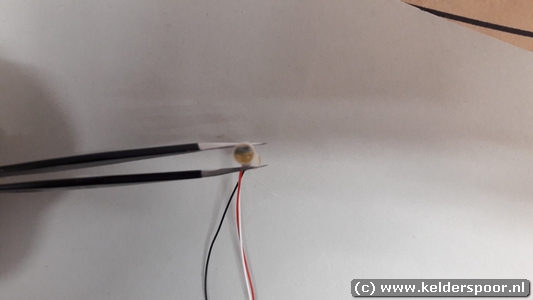
Daarnaast moet voor een goede werking er ook nog een kleine condensator zo dicht mogelijk bij de sensor geplaatst worden.
Er is gezocht naar een eenvoudige en betrouwbare methode voor de inbouw van deze sensoren en die hebben we ook gevonden.
Door de sensor en condensator in een klein plastic buisje te lijmen, wordt het plaatsen en afstellen vrij eenvoudig.
Keer terug naar sub menu.
Keer terug naar menu.
Het maken van sensoren:
Hoe de sensoren zo gemaakt zijn waarbij deze makkelijk zijn te plaatsen en eenvoudig is af te stellen, bespreken we hierna.
Benodigde materialen en gereedschap:
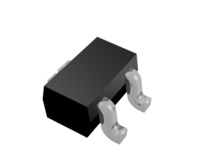
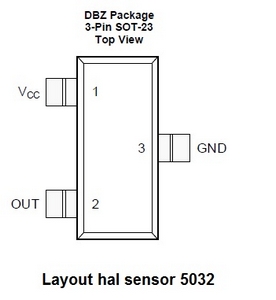
Sensor DRV5032FB (SOT23 behuizing)
Condensator 100nF/16V SMD (1206, 804 of 603 uitvoering)
Decoderdraad rood
Decoderdraad zwart
Decoderdraad wit
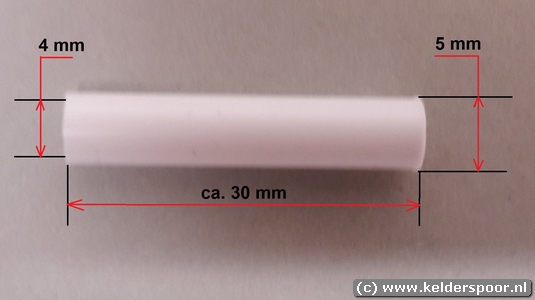
Plastic buis 5mm uitw., 4mm inw.
Lijmpistool.
Soldeerbout met kleine stift
Soldeertin met vloeimiddel (SAC305 of SAC405 voor loodvrij of Sn63/Pb37 voor loodhoudende tin (beide met flux kern)is prima)
Scherp (hobby) mes
(accu)boormachine met boor 5mm
Kleine kniptang
Draad stripper (geschikt voor strippen van decoderdraad)
Voor het los testen van de sensor is extra nodig:
LED (kleur is niet belangrijk)
Weerstand van 1000 ohm (1K)
Voeding 5V DC (gestabiliseerd)
Losse magneet
Bouw van de sensor:
Om te beginnen maken we het plastic buisje van 5mm uitw, 4mm inw, op lengte.
De lengte is ongeveer 15 mm langer dan de plaat dikte die is gebruikt.
In ons geval dus zo'n 30mm (eigenlijk 27mm, maar afgerond naar boven is dit 30mm).
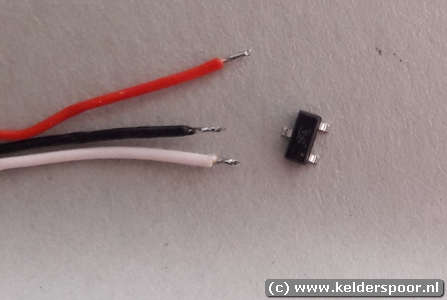
Vervolgens knippen we een stukje rode, zwarte en witte decoderdraad af.
(In plaats van rood, zwart en wit kunnen natuurlijk ook andere kleuren worden gebruikt. Stroom of spanning heeft geen voorkeur voor een kleur draad, maar met de kleur van de draad breng je wel een bepaalde standaard aan.)
Voor de lengte nemen we zoveel als nodig is maar hou minimaal 10cm aan.
We strippen beide uiteinde van de draden af (op ongeveer 10mm) en worden vervolgens vertint.
Probeer bij het vertinnen van de draad dit in zo'n kort mogelijke tijd te doen, om het smelten van de isolatie van de draad te voorkomen.
Bovendien wordt op deze manier niet al het vloeimiddel (flux) wat in de soldeertin zit verbruikt en blijft er op deze manier nog wat (heel klein beetje) over om later makkelijker een verbinding te kunnen maken.
Het vertinde uiteinde wat aan de sensor moet worden gesoldeerd, knippen we af op ca 2 mm.
Nu worden de drie draden aan de kleine pootjes van de sensor gesoldeerd.
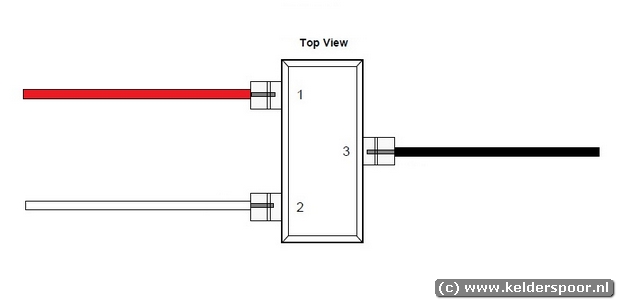
Waar welke kleur moet komen kun je zien op tekening hierboven, waarbij rood de +, zwart de gnd (0) en wit de schakeluitgang is.
Voor het vastsolderen van de draden aan de sensor is het makkelijker, als de sensor ondersteboven even vast wordt gezet met wat tape op een (temperatuur bestendige) ondergrond.
Probeer bij het solderen zo min mogelijk tin te gebruiken.

Het mooiste gaat het als je eerst het pootje van de sensor vertint op dezelfde wijze als de draden.
Soldeer de juiste kleur (vertinde) draad op het juiste pootje van de sensor.


Extra tin is dan vaak niet nodig als je bij het vertinnen van de draad en pootje slechts kortstondig heb verwarmd.
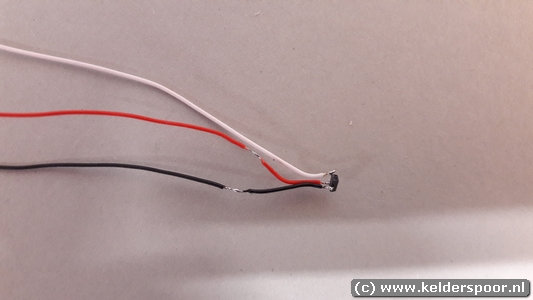
Na het aanbrengen van de draden worden van de rode en zwarte draad op ongeveer 10mm van de sensor de draad over een lengte van ca 3 mm blank gemaakt.
Deze blanke delen worden vertint en worden vervolgens op het uiteinde van de condensator van 100nF gesoldeerd.
Controleer of alles nu op de juiste manier aan elkaar is gezet.
Keer terug naar sub menu.
Keer terug naar menu.
Testen geeft zekerheid.
Voordat we deze gaan inbouwen is het natuurlijk handig om de sensor eerst even te testen.
Hiertoe hebben we een magneetje, een weerstand van 1000 Ohm en een LED nodig.
Een LED heeft doorgaans aan een stroom van 10mA nodig om volledig op te lichten.
De gebruikte hall-sensor heeft een uitgangsstroom van maximaal 5 mA wat doorgaans voldoende moet zijn om een normale standaard LED te doen oplichten, alleen niet op volle sterkte.
Volle sterkte is ook niet nodig omdat het slechts om een indicatie gaat.
Dit is ook de rede dat er een voorschakelweerstand van 1000 Ohm wordt gebruikt.
De sensor wordt op een spanning van 5 volt aangesloten en voor de LED rekenen we 2 volt spanning.
Blijft er dus 3 volt over voor de weerstand.
Omgerekend betekend dit dat bij een weerstand van 1000 Ohm er een stroom gaat vloeien van 3mA en blijft hiermee onder de maximum stroom van de hall-sensor.
Aansluiten en uitvoeren van de test:
Sluit een 5V gestabiliseerde spanning aan op de rode en zwarte draad (rood is + en zwart is GND (0)).
Breng de weerstand van 1000 Ohm aan tussen de + en de + zijde van de LED (doorgaans het langere pootje).
Sluit de - zijde van de LED (het kortere pootje of de platte zijde van LED) aan op de witte draad van de sensor.
Controleer het geheel of alles goed is aangesloten.
Indien juist aangesloten, kan de voeding worden ingeschakeld en als het goed is moet de LED gedoofd zijn.
So far, so good....
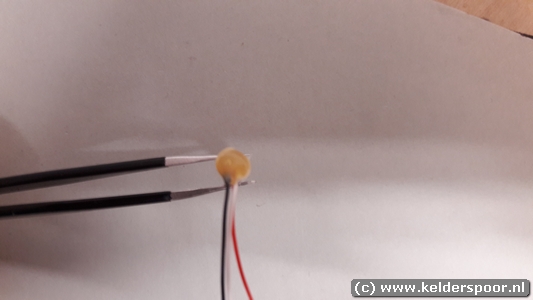
Beweeg nu een losse magneet (of de sleper van een Faller Car voertuig) aan de bovenzijde van de sensor
De led moet nu aan gaan en weer uit indien de magneet wordt verwijderd.
(op onderstaande foto's is de plastic buis al over de sensor geschoven.)
Indien het functioneerd zoals hierboven is beschreven is de sensor in orde en kunnen we verder gaan met maken van de sensor voor inbouw.
De voeding en de LED met weerstand kunnen nu weer los genomen worden.
Afbouw van de sensor.

Stop nu de draden door het buisje en laat de sensor tot iets boven de buis zakken (1 a 2mm is voldoende).
Breng aan de onderzijde in het buisje wat lijm met het lijmpistool aan en laat dit even uitharden (5 tot 10 seconden).
Druk nu de sensor aan de bovenzijde zover naar beneden dat deze gelijk ligt met de rand en laat ook hier wat lijm uit het lijmpistool in lopen.
Wacht totdat de lijm is uitgehard met snij met een scherp mesje aan de bovenzijde de lijm resten weg, zodat de bovenzijde weer vlak wordt.
De sensor is nu klaar om ingebouwd te worden.
Keer terug naar sub menu.
Keer terug naar menu.
Inbouw van de sensor in het wegdek.
Door een gaatje van 5 mm in de ondergrond te boren kan de buis eenvoudig worden geplaatst.
Bij het plaatsen van de buis moet de sensor aan de bovenzijde zitten, dus de zijde van de magneetband/rijdraad.
Het beste kun je dit doen door de buis vanaf de onderzijde in te brengen.
De horizontale en verticale uitlijning kan simpelweg worden gedaan door de buis te verdraaien, naar boven of beneden te plaatsen.
Zorg er in ieder geval voor dat de sensor zo dicht mogelijk onder het wegdek komt te liggen.
De rijdraad mag eventueel pal naast de sensor lopen.
Bij gebruik van magneetband moet er een stukje magneetband van ca 15mm lengte worden verwijderd, waarbij het gat voor de buis (5mm) in het midden moet komen te liggen.
Knip een klein stukje rijdraad van 15 mm af en breng dit in het onderbroken deel van de magneetband aan.
Zorg er hierbij voor dat de rijdraad over of pal naast de sensor loopt.


Keer terug naar sub menu.
Keer terug naar menu.
Testen.
Om te weten of de geplaatste sensor goed functioneert, kunnen we deze eerst even testen voordat het definitief met het wegdek afdekken.
Het testen gaat eigenlijk op eenzelfde methode zoals hiervoor is beschreven, alleen komt hier nu het afstellen bij.
Sluit een 5V gestabiliseerde spanning aan op de rode en zwarte draad (rood is + en zwart is GND (0)
Breng de weerstand van 1000 Ohm aan tussen de + en de + zijde van de LED (doorgaans het langere pootje).
Sluit de - zijde van de LED (het kortere pootje of de platte zijde van LED) aan op de witte draad van de sensor.
Controleer het geheel of alles goed is aangesloten.
Indien juist dan kan de voeding worden ingeschakeld, de LED moet nu gedoofd zijn.
Is dit niet het geval, dan moet je de sensor verdraaien, naar boven of beneden schuiven totdat de LED uit is.
Schakel de spanning uit en na 2 seconden weer in.
De LED moet uitblijven.
Zorg er nu voor dan de spanning blijft ingeschakeld.
Indien je gebruik maakt van een magneetband, is het onderbroken stukje opgevuld met een stukje rijdraad.
Fixeer dit eventueel met stukje tape, om te voorkomen dat de draad nog kan verschuiven.
Leg over het een gedeelte waar de draad (of draad met magneetband) waar de sensor zit een stukje dun karton over een afstand van ca 40cm en laat een voertuig over dit gedeelte rijden.
Tekens als het voertuig over de plek van de sensor rijdt, moet de LED even kort oplichten.
Is dit het geval dan werkt de sensor naar behoren en kunnen we verder.
In het geval dat deze niet goed functioneerd, moet de sensor even bijgesteld worden (draaien, naar boven of beneden).
Keer terug naar sub menu.
Keer terug naar menu.
Alternatief.
Een alternatief voor de sensoren is er ook en functioneer ook uitstekend.
Je kunt in plaats van de hall-sensor ook gebruik maken van reedcontacten.
Dit zijn eigenlijk schakelaars die reageren op een magnetisch veld en kunnen dus ook gebruikt worden.
Indien je reedschakelaars (of reed switches) wilt gebruiken kun je ook gebruik maken van de hierna besproken besturing.
Hierbij kan ook gebruik gemaakt worden van de magneet die al op de sleper van het voertuig is aangebracht.
Gebruik in ieder geval reedcontacten die klein zijn.
Hoe groter het type hoe meer stroom er geschakeld kan worden, maar heeft ook meer massa.
Gezien de stroom die geschakeld wordt, kunnen de reedcontacten erg klein zijn (schakelstromen kleiner dan 0,2mA).
De massa van de schakelaar bepaald in grote mate ook de gevoeligheid, hoe kleiner deze is, hoe gevoeliger en des te makkelijker is hij in te bouwen.
 Ook zal een reedcontact met weinig massa makkelijker schakelbaar zijn door de magneet van de sleper.
Ook zal een reedcontact met weinig massa makkelijker schakelbaar zijn door de magneet van de sleper.
Reedschakelaars van 7mm lang en een buisdoorsnede van 1,8 mm zijn prima bruikbaar.
De uitlopers (aansluitdraden) kun je zelfs gebruiken als draad voor de magneet van de sleper.
Het beste kun je deze ook in de looprichting van de magneetband of rijdraad plaatsen.
Daar waar deze geplaatst moet worden, wordt de magneetband of rijdraad over een lengte van ca 40mm weg gehaald.
In het midden van deze onderbreking boor je een gat van 5mm en snij je met een scherp hobbymesje in de lengte richting van de magneetband of rijdraad, aan beide zijde een kort gleuf uit van ca 3mm breed, 4mm diep en 4 a 5mm lang.
Voordat je de aansluitdraden gaat buigen, overuig je ervan dat de schakelcontacten met de breede kant van boven zichtbaar moet zijn.
Buig de aansluitdraden nu voorzichtig haaks naar boven om op ca 1 mm van de glasbuis.
Zorg er voor dat de glasbuis niet breekt, anders is de reedschakelaar onbruikbaar.
Controleer of de reedschakelaar nu in de sleuf past en buig dan de aansluitdraden om en de lengte richting van de rijdraad of magneetband.
Indien de uitlopers te lang zijn kun je deze inkorten.
Bij gebruik van een mageentband doe je er verstandig aan om de draad op ca 2mm van de magneetband te laten eindigen.
Breng nu 2 aansluitdraden via het gat van 5 mm aan, en verbind elke uitloper van de reedschakelaar met een draad .
De controlele op de werking gaat hetzelfde als bij de sensor met een LED, weerstand en voedingsbron.
Indien de zaak goed functioneerd kan met het lijmpistool wat lijm boven in het gat worden aangebracht om de reedschakelaar te fixeren.
Eventueel kan de overtollige lijm aan de bovenzijde worden weg gesneden.
Keer terug naar sub menu.
Keer terug naar menu.
De regeling.
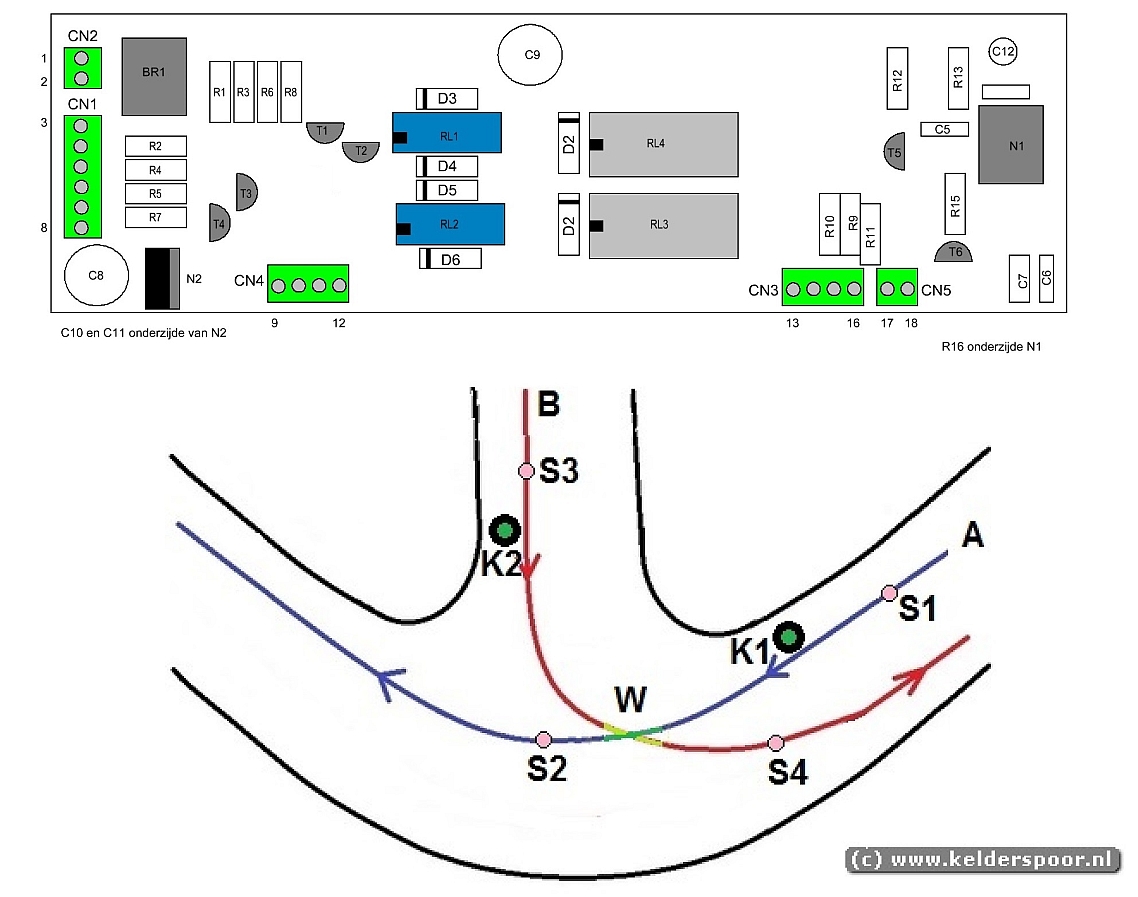
Om de stand van de wissel goed te regelen, zijn er in totaal 4 sensoren nodig.
(In plaats van hall-sensoren kunnen ook reedschakelaars aangesloten worden. Deze kunnen ook samen met hall-sensoren gebruikt worden. Bij de reedschakelaars vervalt de rode aansluitdraad die wordt genoemd in de beschrijving.)
Op de tekening hieronder staat aangegeven waar de sensoren en de stopspoelen geplaatst worden.
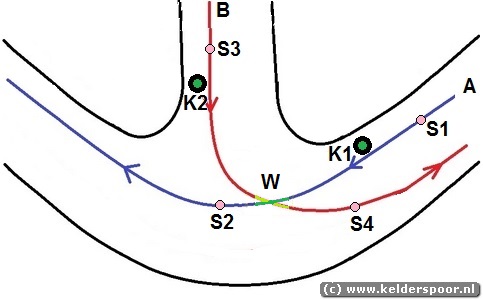
De werking is als volgt:
We gaan er even vanuit dat er nog geen voertuigen zijn gepasseerd over de sensoren.
Stel er komt nu een voertuig vanuit richting "A".
Deze passeert als eerste de inrij sensor "S1".
Als sensor "S1" het voertuig detecteert, wordt de wissel "W" zodanig gezet, dat het voertuig de route kan vervolgen en wordt de stopspoel "K2" geactiveerd.
Hiermee wordt een voertuig die eventueel vanuit richting "B" de wissel nadert gestopt, voordat deze de wissel over gaat.
Nadat het voertuig die vanuit richting "A" de wissel "W" is gepasseerd, wordt door de uitrij sensor "S2" gedetecteerd of het voertuig dit punt passeert.
Na het passeren van "S2" wordt de stopspoel "K2" weer uitgeschakeld.
Indien er een voertuig vanuit route "B" door sensor "S3" wordt (of al is) gedetecteerd, zal de wissel in de andere stand worden gezet.
Gelijktijdig zal stopspoel "K1" worden geactiveerd.
Mocht er nu een voertuig vanuit richting "A" de wissel naderen dan zal deze stoppen voor de wissel.
Passeert het voertuig uit richting "B" sensor "S4", dan wordt de stopspoel "K1" weer uitgeschakeld.
Is inmiddels door inrijsensor "S1" een voertuig gedetecteerd, dan zal na het uitschakelen van stopspoel "K1" ook de wissel "W" weer worden omgezet.
Indien dit niet het geval is, zal de wissel pas van stand veranderen nadat inrij sensor "S1" een voertuig heeft gedecteerd.
Indien er uit beide richtingen een voertuig wordt gedecteerd, zal er altijd één de eerste zijn.
Deze zal te allen tijde de stopspoel in de ander route blokkeren.
De schakeling zal altijd onthouden of er een voertuig vanuit de andere richting reeds de inrij sensor (S1 of S3) al gepasseerd is.
De schakeling.
Textueel is nog wel allemaal te volgen en te begrijpen.
De schakeling is echter toch wat meer complex.
Voor een wat doorgewinterde elektronica hobbyist misschien nog wel te doorgronden, voor een leek echter een stuk moeilijker.
Als je "hoe" het functioneerd niet zo belangrijk vindt kun je dit gedeelte wel overslaan en kun je door naar de bouwbeschrijving indien je direct aan de slag wilt.
Wil je toch weten "hoe" het functioneerd volgt hier de uitleg:
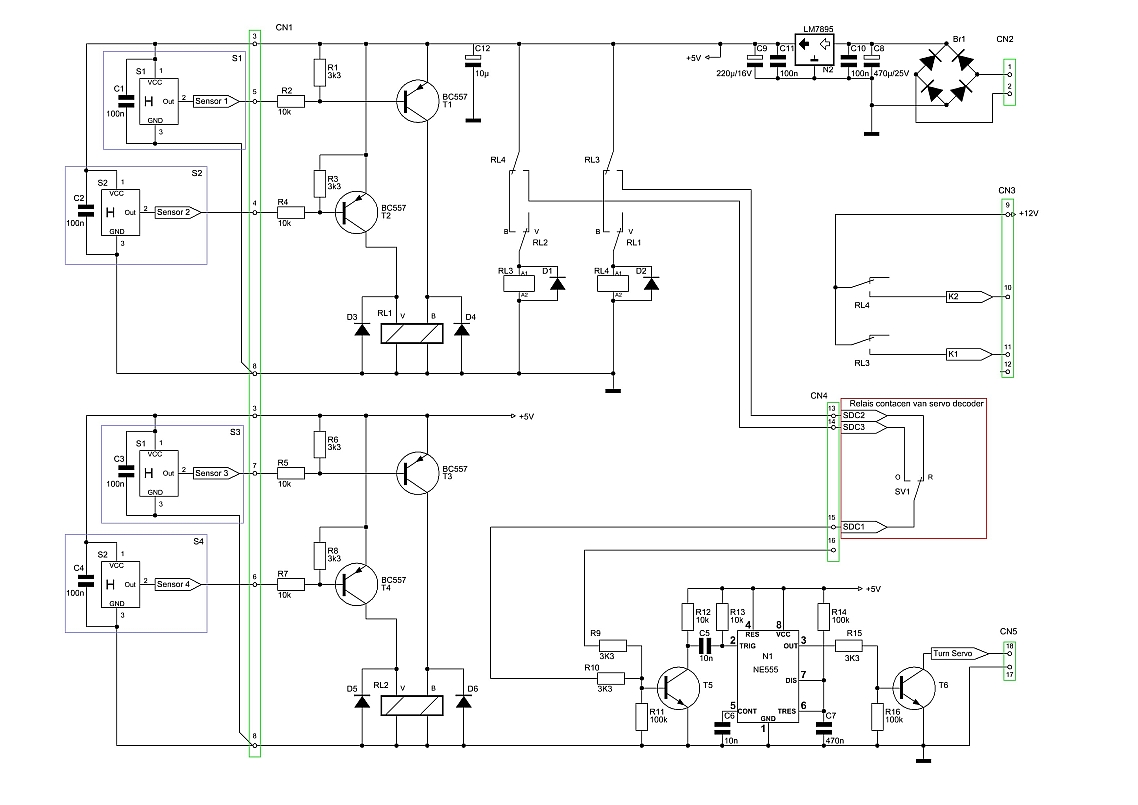
We beginnen met het schema zoals dit electrisch is opgebouwd.
Oops...
Dat vergt wat uitleg.
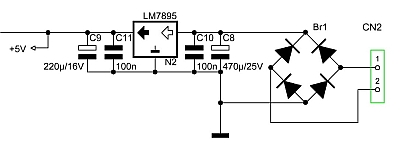
Om vooraan te beginnen, als eerst wordt de gehele schakeling via de gelijkbrug BR1 en de spanningstabilsator N2 voorzien van een 5 Volts spanning.
De condensator C8, C9, C10 en C11 dienen voor afvlakking en ontstoring van de voeding.
De afvlak condensator C 11 is wat kleiner genomen omdat het totale stroomverbruik erg laag is (zo'n 30mA maximaal).
C12 is als extra ontstoringscondensator aangebracht en zit wat verder van N2 vandaan.
C1 t/m C4 zijn de onstoringscondensotoren voor de Hall-sensoren en zijn bij de sensor zelf aangebracht, zie het deel "Bouw van de sensor".
De rest van de schakeling vormt het uiteindelijke schakeldeel om de servodecoder mee aan te sturen.
De uitleg over de werking van dit deel kunnen we het beste doen aan de hand van een voorbeeld.
Om te beginnen gaan we van de situatie uit dat de relais RL1 en RL2 in de rust stand staan (spoel "V" is het laats bekrachtigd geweest).
Alle contacten staan dan in de stand zoals deze op de tekening staan.
Verder nemen we even aan dat de servo voor de wissel de in de stand "R " staat, dus voor verkeer komend uit richting "A".
Om de uitleg wat te vereenvoudigen praten we nu alleen even wat er gebeurd als sensor S1 en S2 hun werk gaan doen.
Voor de sensoren S3 en S4 is het verhaal hetzelfde.
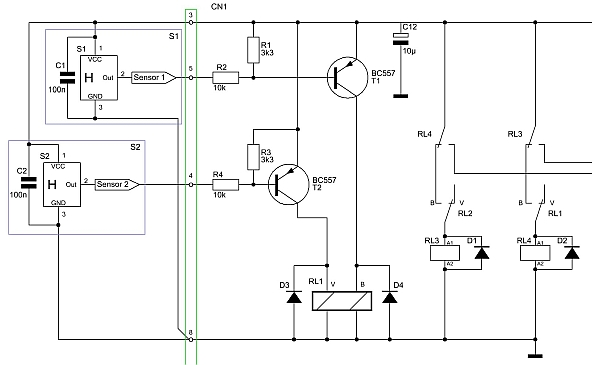 Links boven in de tekening zien we de sensoren S1 en S2 zitten.
Links boven in de tekening zien we de sensoren S1 en S2 zitten.
Wat zich in het blauwe kader bevindt, is datgene wat in het kleine plastic buisjes zit, een Hall-sensor en een condensator.
De uitgang van de sensor S1 is aangesloten via weerstand R2 op de basis van de PNP transistor T1.
Verder is de basis van T1 met een weerstand R1 verbonden met de +5V.
Indien er geen magneet in de buurt is ( dus nog geen voertuigen), is er geen signaal uit de hall-sensor aanwezig en is de basis van de transistor T1 nagenoeg +5V.
Hierdoor is de transtor niet in geleiding en gebeurt er nog niets.
Zoals de schakelcontacten van de relais nu staan getekend (de begin stand dus), wordt de servo en geen enkele stopspoel aangestuurd (zie hoofdschema).
Indien er een magneet in de buurt van sensor 1 komt( er komt dus een voertuig vanuit richting "A "aan), wordt de uitgang van de sensor aan massa gelegd.
Hierdoor wordt het signaal op de basis van de transisor via weerstand R2 naar massa getrokken en wordt de spanning op de basis van transtor T1 lager dan +5V.
Hierdoor komt transistor T1 in geleiding.
Dit heeft tot gevolg dat de spoel "B" van het bi-stabile relais RL1 wordt bekrachtigd.
Hierdoor worden de schakelcontacten van RL1 omgezet.
De spoel van relais RL4 wordt hierdoor bekrachtigd en de schakelcontacten van RL4 worden omgezet.
Nu wordt er via het 1e schakelcontact van RL4 het circuit naar RL3 onderbroken en +5 V gezet op SDC3.
SDC1 t/m 6 zijn de contact aansluitingen van het relais op de servodecoder.
Er wordt voor de besturing echter maar 1 schakelcontact gebruikt en daarbij horen de aansluitklemmen SDC1, SDC2 en SDC3.
Deze zulen alleen veranderen als de servo in de andere stand gezet wordt.
Aangezien de servo (de wissel dus) in de stand "R" staat, komt deze +5V niet verder (SV1 staat in stand "R") en gebeurd er verder nog niets.
Het 2e schakelcontact van RL4 is ook omgezet.
Hierdoor wordt de stopspoel K2 van spanning voorzien en zullen de voertuigen die uit richting B komen stoppen voor de wissel.(zie hoofdschema)
Als het voertuig vanuit richting "A" de sensor 2 paseerd, zal de spoel "V" worden bekrachtigd (via R4 en T2) en worden de schakelcontacten van RL1 weer in de oorspronkelijke stand gezet waardoor ook de stopspoel K2 weer wordt afgeschakeld.
Voor de sensoren S3 en S4 speelt zich een gelijksoortig verhaal af.
Stel nu dat er een voertuig uit richting "B" komt.
Als eerste wordt sensor 3 dan actief en zal de uitgang van de sensor aan massa komen te liggen.
Op dat moment wordt spoel "B" van RL 2 bekrachtig en gaan de schakelcontacten van dit relais in de andere stand staan.
Hierdoor wordt de spoel van relais RL3 bekrachtigd en wordt de stopspoel "K1" van spanning voorzien en wordt er +5V gezet op SDC2.
Aangezien het schakelcontact SV1 in de stand "R" staat, komt er op SDC1 ook +5V te staan.
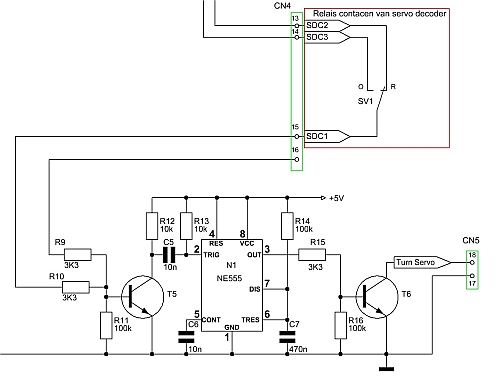
Hierdoor komt een nog onbesproken deel van de schakeling in werking.
Het circuit rond N1 (NE555) is opgebouwd als een monostabile multivibrator (het onderste deel van voorgaande tekening).
Het doel van deze schakeling is om onafhankelijk van de pulslengte op de ingang een puls op de uitgang te geven die altijd even lang is.
Hier geldt indien de ingang (pin 2) aan massa wordt gelegd zal bij de aangegeven waarde van de componenten aan de uitgang een puls van ca 50ms (0,05 seconden) verschijnen.
Hoe lang de puls aan de ingang ook duurt, dit heeft geen invloed op de lengte van de puls die aan de uitgang verschijnt.
Deze puls wordt gebruikt de servo decoder aan te sturen om de servo in de andere stand te zetten.
We weten inmiddels dat er via SDC2 en SV1 er +5V wordt aangeboden aan R10.
Hierdoor komt T5 in geleiding en wordt het knooppunt R12 en C5 nagenoeg aan massa gelegd,
Doordat punt R10/C5 aan massa wordt gelegd is pin 2 van N1 laag waardoor de timer wordt getriggerd.
De condensator C5 laad zich op via weerstand R11 en pin 2 is na korte tijd weer nagenoeg +5 Volt.
Direct na het starten van de timer wordt de uitgang (pin 3) hoog (+5v) en na de tijd van 50mS weer laag (0V).
(Deze tijd wordt bepaald door de waarde van R14 en C7. Bij de aangegeven waarde is die tijd ca 50mS.)
Deze puls stuurt op zijn beurt weer T6 open en komt het punt "Turn Serv0" gedurende die 50mS aan massa te liggen.
De servo zet de wissel in de andere stand en bij het bereiken van de eindstand worden de schakelcontacten van het relais van de servodecoder (SV1) omgezet.
Door het omschakelen van SV1 wordt T5 niet meer gestuurd en zal punt R10/C5 weer nagenoeg +5V worden en kan C5 zich ontladen via R10 en R11.
Indien het voertuig over S4 rijdt, wordt spoel "V" van RL2 bekrachtigd (via R7 en T4)en gaan de schakelcontacten van RL2 en RL3 weer naar de oorspronkleijke stand.
Hierdoor wordt de stopspoel K1 niet meer van spanning voorzien.
Komt er nu een voertuig uit richting "A", dan speelt zich eigenlijk hetzelfde verhaaltje af alleen wordt nu de servo weer in de stand "R "gezet.
Een bijkomend iets is nog dat er een vergrendeling in zit, waardoor er nooit twee voertuigen over de wissel kunnen.
Deze vergrendeling kun je terug vinden in de schakelwijze van RL3 en RL4.
Het is namelijk onmogelijk dat beide relais bekrachtigd kunnen zijn omdat deze elkaars inschakelcircuit blokeren.
Dit is gedaan met de plaatsing van de contacten RL3 en RL4.
Is RL3 bekrachtigd, dan kan nooit de spoel van RL4 bekrachtigd worden.
Omgekeerd geldt dat ook als RL4 wordt bekrachtigd kan RL3 niet worden bekrachtigd.
Aansluit punt 16 op CN4 kan gebruikt worden om met een drukknop de servo handmatig in een andere stand te zetten.
Deze sluit je dan aan tussen punt 16 van CN4 en punt 3 van CN1.
Hier geldt dan wel dat S1 of S3 niet geactiveerd mogen zijn. Is dat wel het geval, dan zal de wissel weer automatisch in de richting van de gemelde sensor gezet worden.
Zo......., een flinke kluif.
De weg kwijt ? Lees het nog eens rustig door.
Keer terug naar sub menu.
Keer terug naar menu.
Bouwbeschrijving.
Even een waarschuwing vooraf:
Niet iedereen zal de bouw even makkelijk vinden en vraagt wat handvaardigheid en kennis van soldeer techniek.
Als je hier niet bedreven in bent of nog nooit gedaan hebt, is het een hele opgave om dit te doen.
Enige ervaring is eigenlijk wel gewenst.
Als je hier geen ervaring mee hebt, raad ik het af om hier aan te beginnen, het zou alleen maar tot frustratie leiden.
Anderzijds, je kunt het ook als uitdaging zien....
Omdat het een eenmalige schakeling betreft, kun je dit het makkelijkst op een montage print (gaatjes print) maken.
Ik heb hiervoor gaatjes print gebruikt die losse eilandjes heeft. (bij Conrad nr 1566652)
De onderlinge verbindingen tussen de verschillende componenten zijn gemaakt met draadverbindingen.
Voor veel verbindingen heb ik blank draad kunnen gebruiken omdat deze verder geen verbinding kruisen.
Daar waar verbindingen zich kruisen heb ik geïsoleerd draad gebruik waarbij de isolatie van teflon is.
Tefon heeft het voordeel, dat deze niet smelt als de soldeerbout in de buurt komt of de draad erg heet wordt.
In de onderstaande tekening staat de opstelling van de onderdelen op de print.
De relais RL1 en RL2 zijn bi-stabiele relais die ik nog had liggen, maar je kunt natuurlijk ook andere types gebruiken (In de stuklijst heb ik de bestelnummers voor het relais bij Conrad vermeld.).
Let er wel op dat de spoelspanning 5 Volt is en dan de spoelweerstand hoger is dan 100 ohm, d.i.v.m. het stroomverbruik.
Ook RL3 en RL4 zijn 5 Volt types met een spoelweerstand van 100 ohm of meer.
Voor diegene die het willen nabouwen heb ik een stuklijst toegevoegd met de bestelnummers van Farnell of Conrad.
Stuklijst.
| ID | Type | Omschrijving | Codenummer | Leverancier |
|---|---|---|---|---|
| S1 | DRV5032 | Hall Effect Sensor | 3008984 | Farnell |
| S2 | DRV5032 | Hall Effect Sensor | 3008984 | Farnell |
| S3 | DRV5032 | Hall Effect Sensor | 3008984 | Farnell |
| S4 | DRV5032 | Hall Effect Sensor | 3008984 | Farnell |
| BR1 | Diode brug | |||
| C1 | 100nF | Keramische condensator (SMD 1206) | 452440 | Conrad |
| C2 | 100nF | Keramische condensator (SMD 1206) | 452440 | Conrad |
| C3 | 100nF | Keramische condensator (SMD 1206) | 452440 | Conrad |
| C4 | 100nF | Keramische condensator (SMD 1206) | 452440 | Conrad |
| C5 | 10nF | Keramische condensator | 1420280 | Conrad |
| C6 | 10nF | Keramische condensator | 1420280 | Conrad |
| C7 | 470nF | Keramische condensator | 1420317 | Conrad |
| C8 | 470uF/25V | Elco | 421951 | Conrad |
| C9 | 220uF/16V | Elco | 422030 | Conrad |
| C10 | 100nF | Keramische condensator | 458251 | Conrad |
| C11 | 100nF | Keramische condensator | 458251 | Conrad |
| C12 | 10uF | Elco | 1473860 | Conrad |
| CN1 | >AKZ692/6-2.54-V | Print connector 6 polig | 567757 | Conrad |
| CN2 | AKZ692/2-2.54 | Print connector 2 polig | 567588 | Conrad |
| CN3 | AKZ692/4-2.54 | Print connector 4 polig | 567658 | Conrad |
| CN4 | AKZ692/4-2.54 | Print connector 4 polig | 567658 | Conrad |
| CN5 | AKZ692/2-2.54 | Print connector 2 polig | 567588 | Conrad |
| D1 | 1N4004 | Diode | 567588 | Conrad |
| D2 | 1N4004 | Diiode | 567588 | Conrad |
| D3 | 1N4004 | Diode | 567588 | Conrad |
| D4 | 1N4004 | Diode | 567588 | Conrad |
| D5 | 1N4004 | Diode | 567588 | Conrad |
| D6 | 1N4004 | Diode | 567588 | Conrad |
| N1 | NE555 | Universele timer | 152184 | Conrad |
| N2 | L7805 | Stabilisator 5V | 179205 | Conrad |
| R1 | 3k3 | Weerstand | 1583978 | Conrad |
| R2 | 10K | Weerstand | 1585075 | Conrad |
| R3 | 3K3 | Weerstand | 1583978 | Conrad |
| R4 | 10K | Weerstand | 1585075 | Conrad |
| R5 | 10K | Weerstand | 1585075 | Conrad |
| R6 | 3K3 | Weerstand | 1583978 | Conrad |
| R7 | 10K | Weerstand | 1585075 | Conrad |
| R8 | 3K3 | Weerstand | 1583978 | Conrad |
| R9 | 3K3 | Weerstand | 1583978 | Conrad |
| R10 | 3K3 | Weerstand | 1583978 | Conrad |
| R11 | 100K | Weerstand | 1417570 | Conrad |
| R12 | 10K | Weerstand | 1585075 | Conrad |
| R13 | 10K | Weerstand | 1583978 | Conrad |
| R14 | 100K | Weerstand | 1417570 | Conrad |
| R15 | 3K3 | Weerstand | 1583978 | Conrad |
| R16 | 100K | Weerstand | 1417570 | Conrad |
| RL1 | HFD2/005-S-L2-D | Bi-stabiel relais | 629512 | Conrad |
| RL2 | HFD2/005-S-L2-D | Bi-stabiel relais | 629512 | Conrad |
| RL3 | 2C-L-05VDCRelais | Relais | 629498 | Conrad |
| RL4 | 2C-L-05VDC | Relais | 629498 | Conrad |
| T1 | BC557 | PNP transistor | 154733 | Conrad |
| T2 | BC557 | PNP transistor | 154733 | Conrad |
| T3 | BC557 | PNP transistor | 154733 | Conrad |
| T4 | BC557 | PNP transistor | 154733 | Conrad |
| T5 | BC547 | NPN transistor | 140539 | Conrad |
| T6 | BC547 | NPN transistor | 140539 | Conrad |
| PCB | Printplaat | 1566652 | Conrad |
Bij de bouw begin je met de laagste onderdelen te plaatsen.
Dit zijn dus de weerstanden en diodes.
Indien er naast elkaar gelegen onderdelen elektrisch met elkaar moeten worden verbonden, kun je in veel gevallen de uitlopers ombuigen en deze gebruiken als verbinding.
Het voordeel is dat je dan minder losse verbindingen hoeft te leggen.
Vervolgens plaatsen we de kleine condensatoren (dus niet de elco's) en de transistoren.
De plaatsing van T1, T2, T3 en T4 vraagt wel even wat handigheid, omdat de aansluitpunten ver uit elkaar liggen.
Hierbij worden de uitlopers (pootjes) vrijwel onder de behuizing omgebogen en liggen over een grote lengte blank.
in sommige gevallen kan het wenselijk zijn om hier wat krimpkous aan te brenegen om sluiting te voorkomen.
Vervolgens kunnen de relais en connectoren geplaatst worden.
En als laatste plaatsen we de elco's, deze zijn tenslotte het hoogst.
C10, C11 en R16 worden aan de onderzijde aangebracht.
C10 en C11 moeten zo dicht mogelijk bij N2 geplaats worden en dat gaat het makkelijkst aan de onderzijde.
R16 zit aan de onderzijde omdat dat gewoon het makkelijkst was. Eventueel kan deze weg gelaten worden.
Deze heeft als functie dat bij het wegvallen van de sturing uit N1 (tijdschakeling) de basis van T6 aan massa te leggen, zodat stoorsignalen minder invloed hebben.
Hieronder nog twee overzicht foto's;
Tot slot nog een tip voor de mensen die deze schakeling ook zo willen maken:
Print eerst het schema even uit en leg deze naast je neer samen met een accentueerstift.
Om te weten welke aansluitpennen waar zitten, kun je gebruik maken van datasheets die eenvoudig zijn op te vragen op het www (ik gebruik meestal alldatasheet.com).
Vervolgens kun je de print voorzien van de onderdelen en kun je de verbindingen gaan maken.
Indien je een verbinding hebt gemaakt volgens deze tekening, markeer dan de verbinding op de tekening met een accentueer stift o.i.d.
Op deze manier kun je eenvoudig bijhouden welke verbindingen nog gemaakt moeten worden.
Tevens kun je snel zien of je alles gehad hebt.
Succes met de bouw.
Keer terug naar sub menu.
Keer terug naar menu.
Wordt vervolgd....
Tunnelbouw
 Tunnels kunnen op een modelbaan naar zuid Duits/Zwitsers en Oostenrijks voorbeeld niet ontbreken. Alle tunnelportalen en binnenwanden zijn geheel zelf ......
Tunnels kunnen op een modelbaan naar zuid Duits/Zwitsers en Oostenrijks voorbeeld niet ontbreken. Alle tunnelportalen en binnenwanden zijn geheel zelf ......
Bruggenbouw
 In de modelbaan liggen een drietal bruggen. De brug die geplaatst is tussen de twee benen van de U is volledig zelfbouw. Verder zijn er nog twee dubbelspoors.....
In de modelbaan liggen een drietal bruggen. De brug die geplaatst is tussen de twee benen van de U is volledig zelfbouw. Verder zijn er nog twee dubbelspoors.....
